Балтийский Государственный Технический Университет
им. Д.Ф.Устинова “Военмех”
Кафедра И3
Отчет по домашней работе №1
Студент группы И301:
Преподаватель:
Санкт-Петербург
2002 год
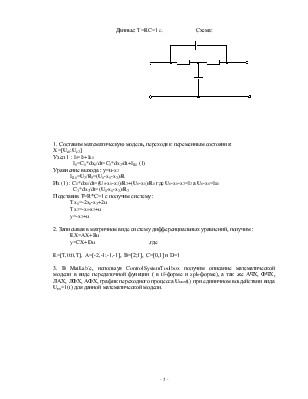
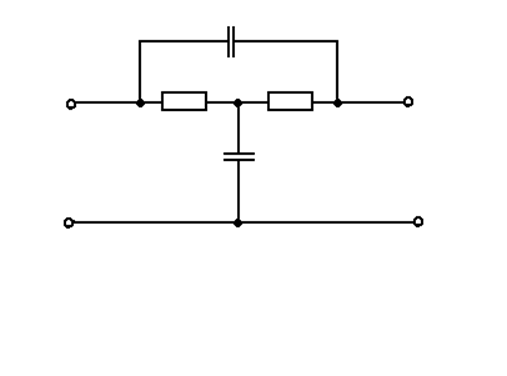
Данные: T=RC=1 c. Схема:
1. Составим математическую модель, переходя к переменным состояния:
X=[Uc1;Uc2]
Узел 1 : I1=I2+IR1
I1=C1*dx1/dt=C2*dx2/dt+IR1 (1)
Уравнение выхода : y=u-x2
IR1=U2/R2=(U1-x1-x2)/R
Из (1) : C1*dx1/dt=(U1-x1-x2)/R2+(U1-x1)/R1 где U1-x1-x2=I2 а U1-x1=IR1
C2*dx2/dt=(U1-x1-x2)/R2
Подставив T=R*C=1 c получим систему :
Tx1=-2x1-x2+2u
Tx2=-x1-x2+u
y=-x2+u
2. Записывая в матричном виде систему дифференциальных уравнений, получим :
EX=AX+Bu
y=CX+Du ,где
E=[T,0;0,T], A=[-2,-1;-1,-1], B=[2;1], C=[0,1] и D=1
3. В MatLab`е, используя ControlSystemToolbox получим описание математической модели в виде передаточной функции ( в tf-форме и zpk-форме), а так же АЧХ, ФЧХ, ЛАХ, ЛФХ, АФХ, график переходного процесса Uвых(t) при единичном воздействии вида Uвх=1(t) для данной математической модели.
4. Текст программы (файл 'tay.m') :
%домашнее задание. файл tay.m
clc;
clear;
close all;
T=1;
A=[-2,-1;-1,-2];;
B=[2;1];
C=[0,-1];
D=1;
E=[T,0;0,T];
dss_model=dss(A,B,C,D,E);
tf_model=tf(dss_model)
zpk_model=zpk(dss_model)
[num,den]=tfdata(dss_model,'v');
[mag,phase,w]=bode(num,den);
[y,t]=step(dss_model);
l=length(t);
for i=l:-1:1
if abs(y(l)-y(i))>0.05*abs(y(1)-y(l))
tp=t(i); break
end
end
fprintf('Продолжительность переходного процесса= %6.2f секунд.\n',tp)
hmax=0;
hmin=0;
for i=1:l
if y(i)>hmax; hmax=y(i); end
if y(i)<hmin; hmin=y(i); end
end
sigma=(hmax-hmin-abs(y(l)-y(1)))*100/abs(y(l)-y(1));
fprintf('Перерегулирование системы= %6.2f процентов.\n',sigma)
disp(' ');
disp('Чтобы вывести графики необходимо нажать клавишу "Enter"');
pause;
%Построение АЧХ,ФЧХ
subplot(2,2,2);
plot(w,mag);
grid;
title('АЧХ');
xlabel('\omega,1/c');
ylabel('A(\omega)');
subplot(2,2,4);
plot(w,phase);
grid;
title('ФЧХ');
xlabel('\omega,1/c');
ylabel('\phi\circ(\omega)');
%Построение ЛАХ,ЛФХ
subplot(1,2,1);
bode(dss_model,w)
%Построение АФХ
%График Uвых(t) при Ud[(t)=1(t)
figure;
subplot(1,2,1);
polar(phase*pi/180,mag);
subplot(1,2,2);
step(dss_model);
grid;
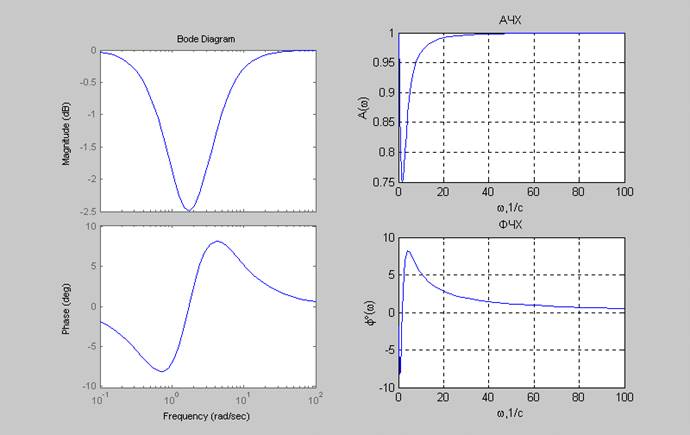
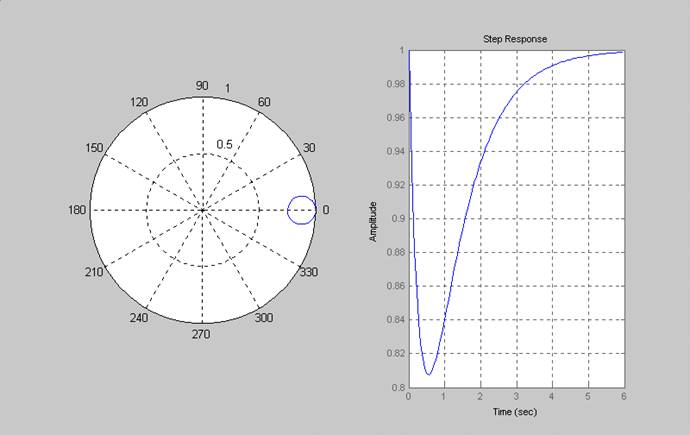
5. Графики АЧХ, ФЧХ, ЛАХ, ЛФХ, АФХ и переходного процесса :
6. Результат программы :
Transfer function:
s^2 + 3 s + 3
------------s^2 + 4 s + 3
Zero/pole/gain:
(s^2 + 3s + 3)
-------------(s+3) (s+1)
Продолжительность переходного процесса= 5.91 секунд.
Перерегулирование системы= 1.28 процентов.
Вывод :
Анализируя вид ПФ и переходного процесса можно сделать выводы, что :
Звено относится к колебательным и при единичном воздействии его перерегулирование δ=1.28%, а время запаздывания tп=5.91 сек для окрестности Δ=0.05.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.