Конспект лекций
Лекция от 09.02.00 ()
Развитие техники диктует постоянное усложнение требований к системам управления. Основная тема – приведение в движение объектов. Необходимо постоянное совершенствование систем. К началу 70-х годов такого вида системы совершенствовать стало трудно. Тогда решили использовать другие алгоритмы, базы для решений. К тому времени бурно стала развиваться электроника. На это и обратили внимание.
Мехатроника занимается управлением сложных систем.
Механика – наука о движении твёрдых тел и происходящих при этом взаимодействий между телами.
Электроника – наука о взаимодействии электронов с электромагнитными полями и о методах создания электрических приборов, в которых эти методы используются для преобразования электрической энергии, для сохранения и преобразования информации.
Мехатроника – наука о движении и взаимодействии твёрдых тел, а также управления с помощью электрических устройств и приборов.
q особенностью мехатронных систем, как объекта исследования, является его информационно-энергетическая сущность. Может быть эта черта – отличительная особенность;
q чем меньше расход энергии, тем система лучше.
Под мехатроникой понимается 2 рода объектов. В узком смысле термин «мехатроника» используется для характеристики мехатронных устройств, в которых использование электронных компонентов позволяет значительно улучшить их характеристики, а иногда реализовать оригинальные принципы действия:
Ø вентильные двигатели;
Ø бесконтактные двигатели внутреннего тока;
Ø преобразователи энергии;
Ø измерительные устройства.
В широком смысле понимают системы приведения в движение объекта управления, в котором используется развитая электронная часть, осуществляющая обработку информации и реализацию эффективности алгоритмов управления. К таким относятся адаптивные системы, системы с автонастройкой параметров, система с переменной структурой, автоматизированные системы испытаний, моделирующие комплексы.
Техническая система – устройство, которое обладает следующей совокупностью признаков:
1. является законченным видом технической продукции;
2. самостоятельно выполняет определённые функции;
3. состоит из взаимодействующих элементов, узлов, агрегатов, подсистем;
4. взаимодействует с другими техническими объектами и внешней средой.
Привод – совокупность устройств объединённых в систему, предназначенную для приведения в движение рабочих органов машин или объектов управления в соответствии с заданной технологией.
Для управления движением любого объекта необходимо сообщать управляющие воздействия изменяющиеся по необходимому закону.
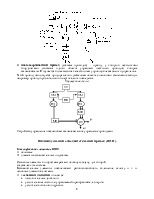
![]() y - внешний вектор возмущения;
y - внешний вектор возмущения;
j - координата объекта;
Му - управляющее воздействие;
ИД – исполнительный двигатель;
МП – механические передачи;
УПЭ – управляемый преобразователь энергии (усилитель мощности);
ИЭ – источник энергии;
УУ – устройство управления;
ЗУ – задающее устройство;
ЗУ – задающее устройство;
Измерители – фактическая координата объекта.
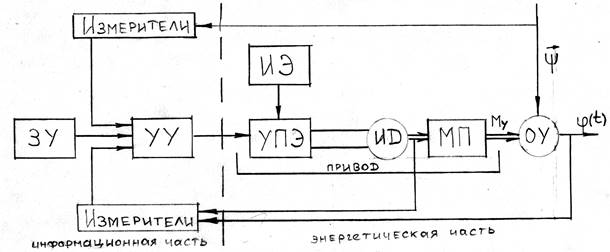
Рис.1
В природе значительная часть погрешностей :
q нелинейное преобразование сигнала;
q ограничение по мощности (энергии);
q трения, сопротивление индуктивной ёмкости;
q люфты и нежёсткость в механической передаче.
Раньше – ограничение в информационной части (проблема работы в реальном времени);
Теперь – ограничение в энергетической части (алгоритмы очень сложные);
В одну точку можно прийти разными путями:

Рис.2
Используют несколько алгоритмов, в т. ч. алгоритм слежения.
Основной этап оценки устройства – умение правильно выбрать и математически описать привод.
Гидропривод – быстрее, но дороже.
Электропривод – дешевле, но медленнее.
Замена УМ:
- перемонтаж электропривода занимает несколько часов;
- перемонтаж гидропривода намного сложнее занимает несколько дней (иногда невозможно).
Лекция 16.02.00 (Демидова)
Приводы мехатронных систем разработаны по своим принципам действия, устройству, характеристикам и схемам построения:
1) по виду энергии, подводимой к исполнительному двигателю мехатронной системы:
· электрический (электромеханический) привод
· гидравлический
· пневматический
2) по мощности
· малой мощности (до 10 Ватт)
· средней (от 10Вт до десятков кВт)
· микропривода (единицы Вт)
3) по типу преобразуемого в приводе сигнала:
· непрерывный (аналоговый) привод
· импульсный
· цифровой
4) по области применения:
· приводы летательных аппаратов
· приводы транспортных средств
· приводы строительных машин
· приводы металлорежущих станков
· приводы роботов-манипуляторов и т. д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.