




















1.  Структурная схема моделируемой системы управления
Структурная схема моделируемой системы управления
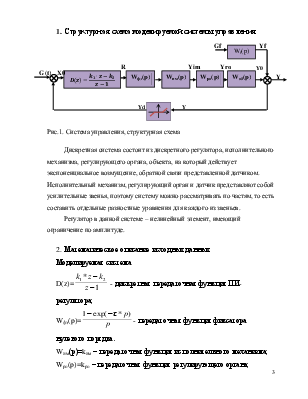
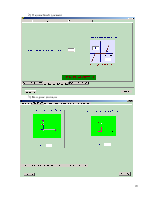
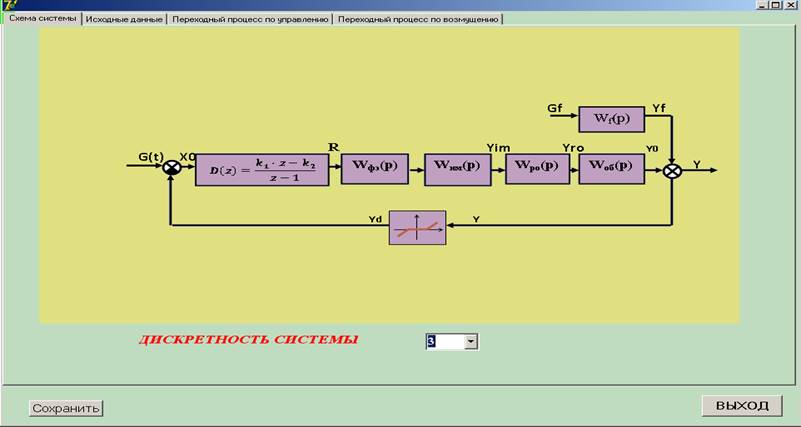
Рис.1. Система управления, структурная схема
Дискретная система состоит из дискретного регулятора, исполнительного механизма, регулирующего органа, объекта, на который действует экспоненциальное возмущение, обратной связи представленной датчиком. Исполнительный механизм, регулирующий орган и датчик представляют собой усилительные звенья, поэтому систему можно рассматривать по частям, то есть составить отдельные разностные уравнения для каждого из звеньев.
Регулятор в данной системе – нелинейный элемент, имеющий ограничение по амплитуде.
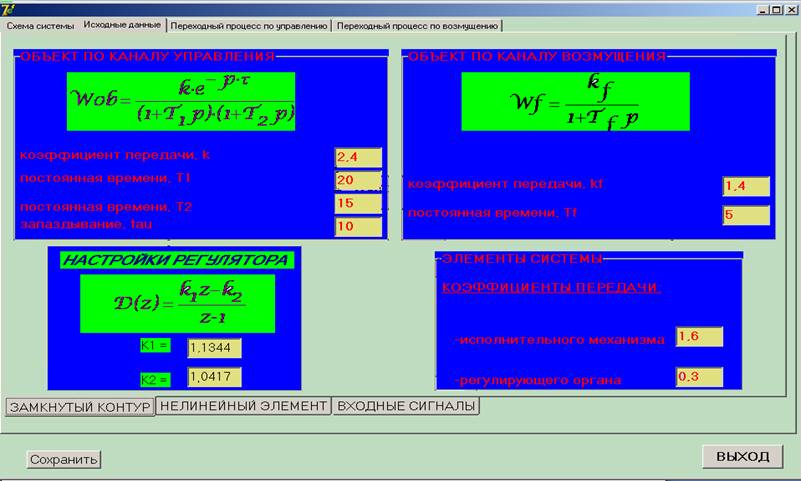
2. Математическое описание исходных данных
Моделируемая система
D(z)= - дискретная передаточная функция ПИ-регулятора;
- дискретная передаточная функция ПИ-регулятора;
Wфэ(p)= - передаточная функция
фиксатора нулевого порядка.
- передаточная функция
фиксатора нулевого порядка.
Wим(р)=kим – передаточная функция исполнительного механизма;
Wpo(p)=kpo – передаточная функция регулирующего органа;
Wo(p)= - передаточная функция
объекта по каналу управления;
- передаточная функция
объекта по каналу управления;
 -передаточная
функция объекта по каналу возмущения;
-передаточная
функция объекта по каналу возмущения;
Wд(р)=kд – передаточная функция датчика;
Нелинейный элемент.
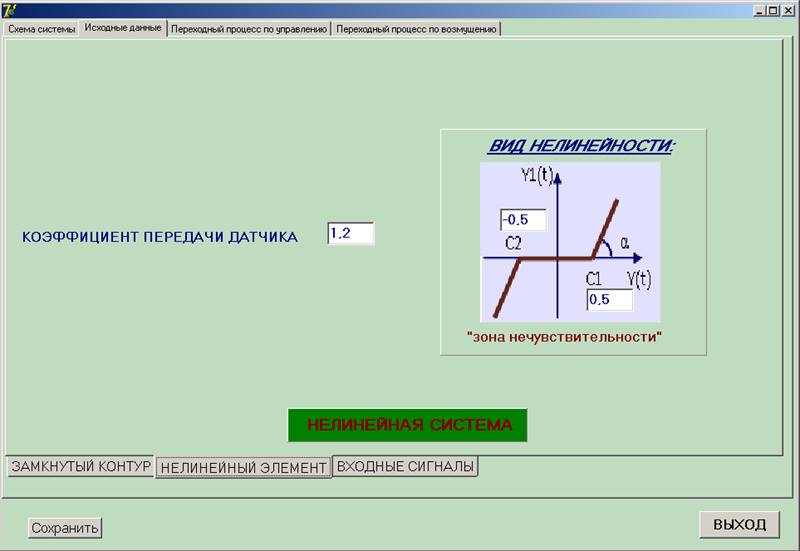
В моделируемой системе нелинейная характеристика присутствует в датчике.
Вид нелинейности.
![]()
Рис.2. Вид нелинейности – “Зона нечувствительности”
3. Определение дискретной модели непрерывной части системы и
соответствующего разностного уравнения.
1. Нахождение дискретной передаточной функции объекта управления:
Запишем разностное уравнение, которое описывает работу объекта по каналу управления:
y0[n] = y0[n-1]*d1 + y0[n-1]*d2 - y0[n-2]*d1*d2 + yro[n-m]*k - yro[n-m-1]*k*d1 - yro[n-m-1]*k*d2 + yro[n-m-2]*k*d1*d2 + yro[n-m]*a*k - yro[n-m-1]*a*k - yro[n-m-1]*a*k*d2 + yro[n-m-2]*a*k*d2 + yro[n-m]*b*k - yro[n-m-1]*b*k - yro[n-m-1]*b*k*d1 + yro[n-m-2]*b*k*d1;
4. Определение непрерывной и дискретной модели нелинейной характеристики заданного элемента системы.
В моделируемой системе нелинейная характеристика присутствует в датчике. Вид нелинейности – «Зона нечувствительности». (рис.3.)
Задана нелинейность дискретного регулятора, которая имеет вид:
![]()
Рис.3. Вид нелинейности – “Ограничение по амплитуде”
Для программирования данной системы необходимо перейти от дискретных функций элементов системы к разностным уравнениям.
1. Получим разностное уравнение для объекта управления:
y0[n] = y0[n-1]*d1 + y0[n-1]*d2 - y0[n-2]*d1*d2 + yro[n-m]*k - yro[n-m-1]*k*d1 - yro[n-m-1]*k*d2 + yro[n-m-2]*k*d1*d2 + yro[n-m]*a*k - yro[n-m-1]*a*k - yro[n-m-1]*a*k*d2 + yro[n-m-2]*a*k*d2 + yro[n-m]*b*k - yro[n-m-1]*b*k - yro[n-m-1]*b*k*d1 + yro[n-m-2]*b*k*d1;
2. Уравнение датчика
3.Сигнал ошибки рассогласования
![]()
4 .Уравнение регулятора
![]()
6.Уравнение исполнительного механизма
Yim[n] = Kим*R[n]
7.Уравнение регулирующего органа
Yro = Kpo*S[n]
8. Возмущение.
Yf:=kf*C;
Анализируя все переменные, которые присутствуют в цикле, можно сделать вывод, что некоторые переменные должны задаваться массивом.
n – текущий такт расчета;
![]() y0[n]
y0[n]
x[n]
Yro[n]
k
T1
T2
Tau
T0
Kd
k1
 k2
k2
kim
kro
G
C1
C2
A
B
R
d1
d2
yd
yim
Yf
C
kf
Tf
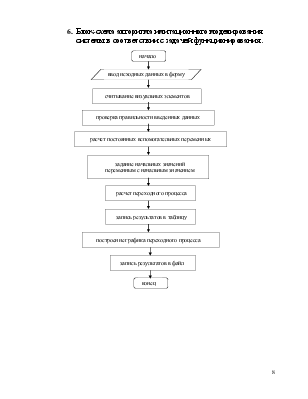
6. Блок-схема алгоритма имитационного моделирования системы в соответствии с задачей функционирования.
 |
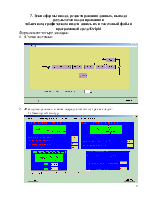
7. Эскиз формы ввода, редактирования данных, вывода результатов моделирования в табличном, графическом виде и запись их в текстовый файл в программной среде Delphi
Форма имеет четыре закладки:
1. «Схема системы»:
2. «Исходные данные», в свою очередь состоит из трех закладок:
1) Замкнутый контур
2) Нелинейный элемент
3) Входные сигналы
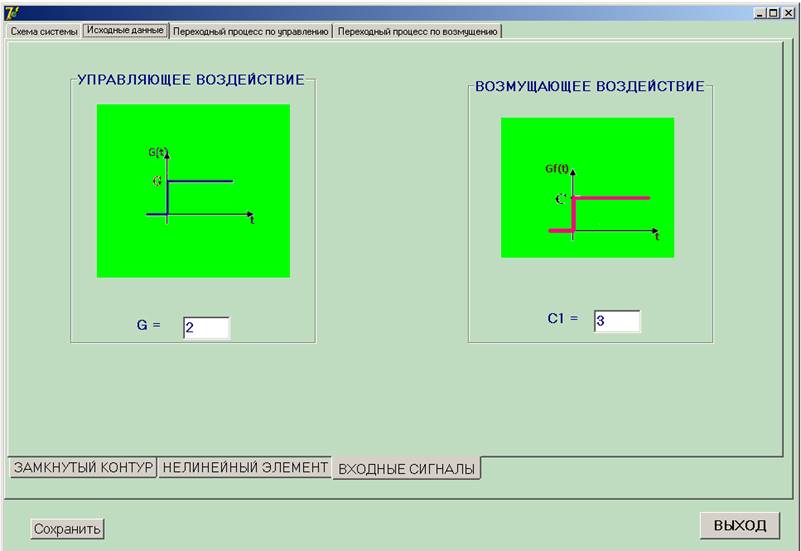
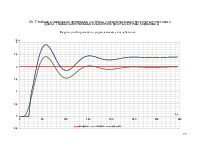
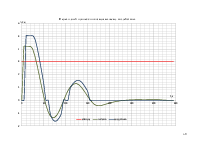
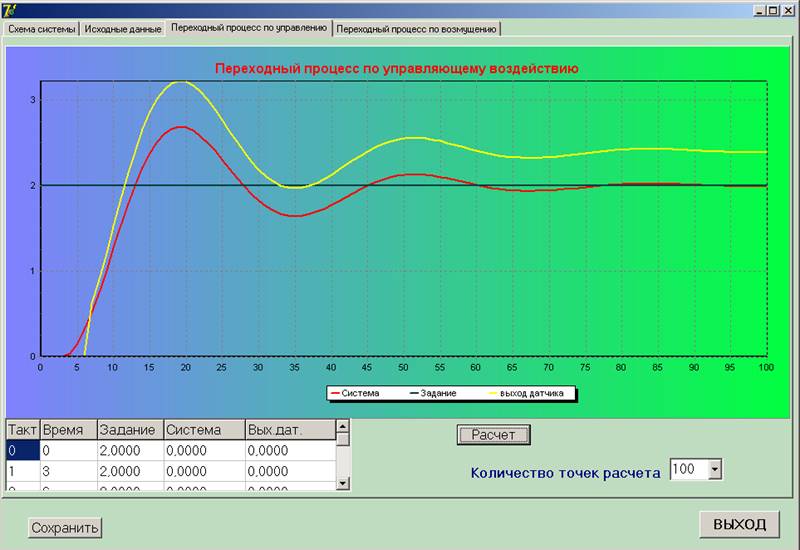
3. Переходный процесс по управлению
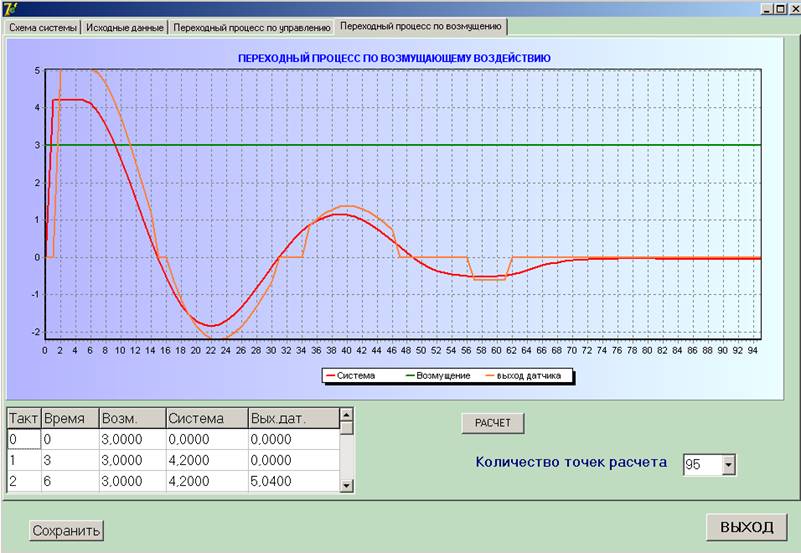
4.Переходный процесс по возмущению
8. Распечатка текста основного программного модуля
unit Unit1;
interface
uses
Windows, Messages, SysUtils, Variants, Classes, Graphics, Controls, Forms,
Dialogs, StdCtrls, ExtCtrls, ComCtrls, Grids, TeEngine, Series, TeeProcs,
Chart, jpeg;
type
TForm1 = class(TForm)
PageControl1: TPageControl;
TabSheet1: TTabSheet;
TabSheet2: TTabSheet;
Button1: TButton;
TabSheet3: TTabSheet;
Chart1: TChart;
Series1: TLineSeries;
Button2: TButton;
StringGrid1: TStringGrid;
ComboBox1: TComboBox;
Label11: TLabel;
Series2: TLineSeries;
Series3: TLineSeries;
OpenDialog1: TOpenDialog;
PageControl2: TPageControl;
TabSheet4: TTabSheet;
TabSheet5: TTabSheet;
GroupBox1: TGroupBox;
Label1: TLabel;
Label2: TLabel;
Label3: TLabel;
Label4: TLabel;
Edit1: TEdit;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.