Подставляем в эти уравнения численные значения параметров объекта и величину m, получаем окончательно:
Итак, определим зависимости ![]() для заданной АСР
для заданной АСР
1. Передаточная функция цифрового регулятора с ПИ-законом регулирования, может быть записана в следующем виде:
![]() коэффициент,
характеризующий пропорциональную составляющую временной динамической
характеристики цифрового ПИ – регулятора
коэффициент,
характеризующий пропорциональную составляющую временной динамической
характеристики цифрового ПИ – регулятора
![]() параметр
изображения решетчатой функции по времени(оригинала)
параметр
изображения решетчатой функции по времени(оригинала)
Z – преобразование связано с дискретным преобразованием Лапласа и вытекает из него.
Для решетчатых функций времени существует понятие дискретного преобразования Лапласа, определяемого формулой:
![]()
mw – абсцисса абсолютной сходимости
Если mw < ∞, то ряд определяемый функцией ![]() сходится,
и решетчатой функции соответствует некоторое изображение. Видно, что
изображение решетчатой функции является функцией величины
сходится,
и решетчатой функции соответствует некоторое изображение. Видно, что
изображение решетчатой функции является функцией величины ![]() . Под
. Под
Z – преобразованием понимается
изображение решетчатой функции, определяемое формулой ![]()
Z – преобразование практически совпадает с дискретным преобразованием Лапласа и отличается только аргументом соотношения изображения.
Таким образом, решетчатая функция времени (оригинал) заменяется ее изображением (Z – преобразованием).
![]() так
же может быть записано и для непрерывной функции в виде:
так
же может быть записано и для непрерывной функции в виде: ![]()
Эти ряды сходятся, и изображение существует, если выполняется условие, сформированное для дискретного преобразования Лапласа mw < ∞, где mw – абсцисса абсолютной сходимости
1) ![]()

2)![]()
![]()

Делаем подстановки:
Тогда:
Расширенная АФЧХ регулятора в показательной форме:

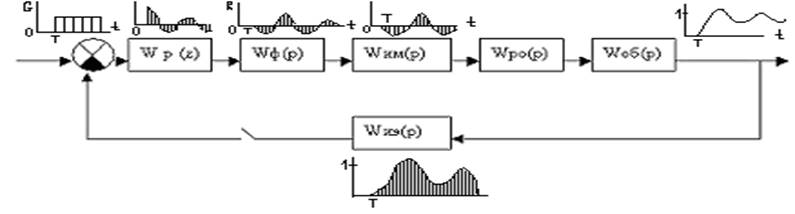
2. Непрерывная часть данной АСР состоит из:
1.) фиксатора 
2.) Исполнительного механизма ![]()
3.) Регулирующего органа ![]()
4.) Объекта управления
5.) Измерительного
элемента ![]()
Измерительный элемент опрашивается в дискретные моменты времени t = nT01. Решетчатая функция У(z) поступает в моменты t = nT01 сигналы задания регулятору, например с уровня УВМ, в виде решетчатой функции G(z).Далее решетчатая функция рассогласования E(z) = G(z) – Y(z) поступает в дискретные моменты времени t = nT01, выходит решетчатая функция R(z), несущая в себе информацию задания команд исполнительному органу. Решетчатая функция R(z) наступает на вход фиксатора (или формирующего устройства). Задача формирующего устройства, заключается в формировании реального импульса прямоугольной, трапециидальной, треугольной и т.п. формы. В нашем случае в качестве формирующего устройства выбран фиксатор, формирующий реальные импульсы прямоугольной формы. Сигнал из фиксатора поступает в непрерывную часть системы.
 Передаточная функция непрерывной части данной АСР:
Передаточная функция непрерывной части данной АСР:
 в изображении по Лапласу
в изображении по Лапласу
Непрерывная часть системы описывается изображением в форме по Лапласу, а дискретная часть описывается изображением в z- форме. Поэтому необходимо непрерывную часть описать изображением в форме z- преобразования. Это необходимо для возможности совместного использования непрерывной и дискретной частей АСР.
Поэтому:

Накладываем ограничения на корни:
![]() и
осуществляем преобразование:
и
осуществляем преобразование:

![]() 1.)
1.) 
2.)
Aоб(m,w)=![]()

3. Параметры настроек
регулятора ![]() необходимо определить из условий.
необходимо определить из условий.
![]()

Это равенство двух комплексных чисел возможно в том случае, если равны модули векторов, а аргументы отличаются на 2πn
(примем n = 0)
т.е.  и
и
![]()
1.) ![]()
2.) ![]()
![]()
![]()
![]()

![]()
3.) ![]()
![]()

Аналитическое решение
этой системы уравнений относительно ![]() найти крайне
трудно, поэтому решение можно найти только с помощью численного метода
найти крайне
трудно, поэтому решение можно найти только с помощью численного метода
Построение численного метода.
Построение численного метода требует дополнительного изучения, исследования, т.к. параметры A,В,C,D,E,Б,T и др. являются функциями m и w.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.