



































Введение
Подъемные машины прерывистого режима работы в различных конструктивных исполнениях находят широкое применение во всех отраслях народного хозяйства. К числу наиболее распространенных разновидностей механизмов вертикального транспорта следует отнести лифты, применение которых в народном хозяйстве и на промышленных предприятиях приобретает все большее значение. Лифты предназначены для транспортировки пассажиров и грузов в производственных и административных зданиях. Они выполняются высокоавтоматизированными, общедоступными, комфортабельными и безопасными. Все операции при открывании и закрывании дверей, передвижении, замедлении и точной остановки кабины лифта осуществляется с помощью электропривода.
Электропривод большинства грузоподъёмных машин характеризуется повторно - кратковременном режимом работы при большей частоте включения, широком диапазоне регулирования скорости и постоянно возникающих значительных перегрузках при разгоне и торможении механизмов. Особые условия использования электропривода в грузоподъёмных машинах явились основой для создания специальных серий электрических двигателей и аппаратов.
1. Технологическое описание механизма
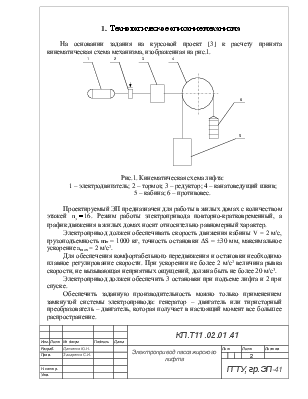
На основании задания на курсовой проект [3] к расчету принята кинематическая схема механизма, изображенная на рис.1.
Рис.1. Кинематическая схема лифта:
1 – электродвигатель; 2 – тормоз; 3 – редуктор; 4 – канатоведущий шкив;
5 – кабина; 6 – противовес.
Проектируемый ЭП
предназначен для работы в жилых домах с количеством этажей ![]() . Режим работы
электропривода повторно-кратковременный, а график движения в жилых домах носит
относительно равномерный характер.
. Режим работы
электропривода повторно-кратковременный, а график движения в жилых домах носит
относительно равномерный характер.
Электропривод должен обеспечивать скорость движения кабины V = 2 м/с, грузоподъемность mн = 1000 кг, точность остановки ∆S = ±30 мм, максимальное ускорение amax = 2 м/с2.
Для обеспечения комфортабельного передвижения и остановки необходимо плавное регулирование скорости. При ускорении не более 2 м/с2 величина рывка скорости, не вызывающая неприятных ощущений, должна быть не более 20 м/с3.
Электропривод должен обеспечить 3 остановки при подъеме лифта и 2 при спуске.
Обеспечить заданную производительность можно только применением замкнутой системы электропривода: генератор – двигатель или тиристорный преобразователь – двигатель, которая получает в настоящий момент все большее распространение.
2. Диаграммы скорости и статических нагрузок
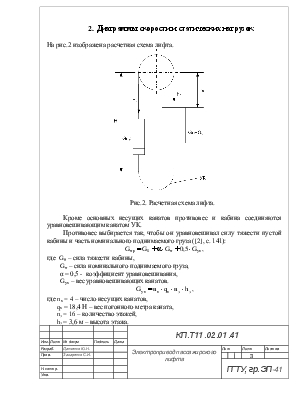
На рис.2 изображена расчетная схема лифта.
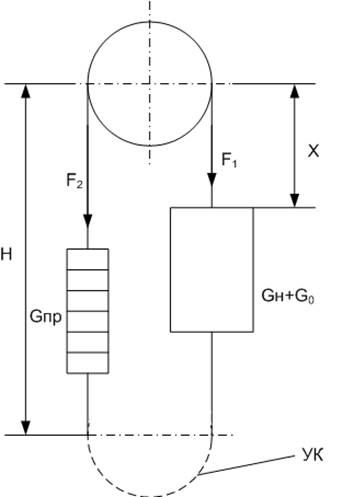
Рис.2. Расчетная схема лифта.
Кроме основных несущих канатов противовес и кабина соединяются уравновешивающим канатом УК.
Противовес выбирается так, чтобы он уравновешивал силу тяжести пустой кабины и часть номинального поднимаемого груза ([2], с. 141):
![]() , где G0 – сила
тяжести кабины,
, где G0 – сила
тяжести кабины,
Gн – сила номинального поднимаемого груза,
α = 0,5 - коэффициент уравновешивания,
Gук – вес уравновешивающих канатов.
![]() , где nк = 4 –
число несущих канатов,
, где nк = 4 –
число несущих канатов,
qк = 18,4 Н – вес погонного метра каната,
nэ = 16 – количество этажей,
hэ = 3,6 м – высота этажа.
Результирующее усилие при подъеме лифта ([1], с. 38):
F = F1- F2,
а при спуске лифта:
F = F2 - F1.
где F1 = Gн + G0
F2 = Gпр
Статический момент определяется по следующим формулам:
где R = 0,8 м – радиус канатоведущего шкива,
iр = 24,2 – передаточное число редуктора,
η = 0,74 – КПД механической части.
Рассчитаем статические моменты при подъеме лифта: пуск с первого этажа при полностью загруженной кабине; лифт делает 3 остановки, на каждой остановке выходит часть пассажиров.
 -после первой
остановки (вышло 3 пасс.);
-после первой
остановки (вышло 3 пасс.);
 -после второй
остановки (вышло 7 пасс.);
-после второй
остановки (вышло 7 пасс.);
 -после третьей
остановки(вышло 4 пасс.).
-после третьей
остановки(вышло 4 пасс.).
Рассчитаем статические моменты при спуске лифта: пуск с верхнего этажа при загрузке в половину номинальной грузоподъемности; лифт делает 2 остановки, на каждой остановке выходит часть пассажиров.
 - после первой
остановки (вышло 4 пасс.);
- после первой
остановки (вышло 4 пасс.);
 - после второй
остановки (вышло 3 пасс.);
- после второй
остановки (вышло 3 пасс.);
Рассчитаем продолжительность каждого участка циклограммы:
Время пуска и торможения кабины:

Путь, пройденный кабиной лифта при пуске до номинальной скорости:
Путь, пройденный кабиной лифта при номинальной скорости:
![]()
1) При подъеме
кабины: ![]() ,
, ![]()
![]()
2) При спуске
кабины: ![]() ,
, ![]()
Суммарное время, затраченное на открывание и закрывание дверей:
![]()
Время,
требуемое для входа (выхода) одного человека: ![]()
Суммарное
время, затрачиваемое при каждой остановке: ![]()
![]() - на
первой остановке при подъеме вышло 3 человека;
- на
первой остановке при подъеме вышло 3 человека;
![]() - на
второй остановке при подъеме вышло 7 человек;
- на
второй остановке при подъеме вышло 7 человек;
![]() - на
третьей остановке вышло 4 человека и зашло 7 человек;
- на
третьей остановке вышло 4 человека и зашло 7 человек;
![]() - на
первой остановке при спуске вышло 4 человека.
- на
первой остановке при спуске вышло 4 человека.
Время
движения кабины: 
Время, затраченное при подъеме:
1) до первой
остановки: 
2) до второй
остановки: 
3) до третьей
остановки: 
Время, затраченное при спуске:
1) до первой
остановки: 
2) до второй
остановки: 
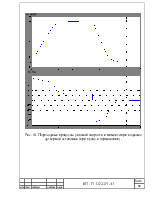
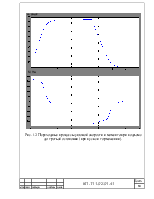
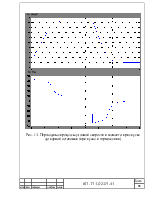
Исходя из расчетов, построим диаграммы скорости и статическую нагрузку механизма:
3. Выбор системы электропривода и электродвигателя
Для обеспечения необходимых технических характеристик и параметров выбираем систему электропривода ТП – Д с реверсивным тиристорным преобразователем, поскольку данная система обладает следующими достоинствами:
1) Плавность и значительный диапазон регулирования скорости (до 1000 в замкнутых электроприводах);
2) Большая жесткость получаемых искусственных характеристик;
3) Высокий КПД электропривода, определяемый высоким КПД трансформатора и управляемого выпрямителя;
4) Бесшумность работы, простота и надежность эксплуатации.
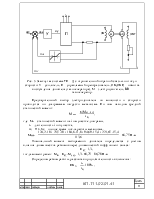
На рис. 5. изображена упрощенная схема системы электропривода ТП – Д.
Для определения диапазона регулирования произведем расчет параметров и расчет характеристики для точной остановки электропривода с учетом точности остановки.
По
заданию погрешность остановки механизма: ![]() .
.
Наибольшее влияние на погрешность оказывает начальная скорость перед
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.