МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ ИМЕНИ П.О.СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Автоматизированный электропривод»
Лабораторная работа № 2
по дисциплине: «Автоматизация типовых технологических установок и комплексов»
«Дистанционное управление столом продольно-строгального станка»
Исполнитель: студент гр. ЭП-41
Руководитель: доцент, к.т.н.
Гомель 2006
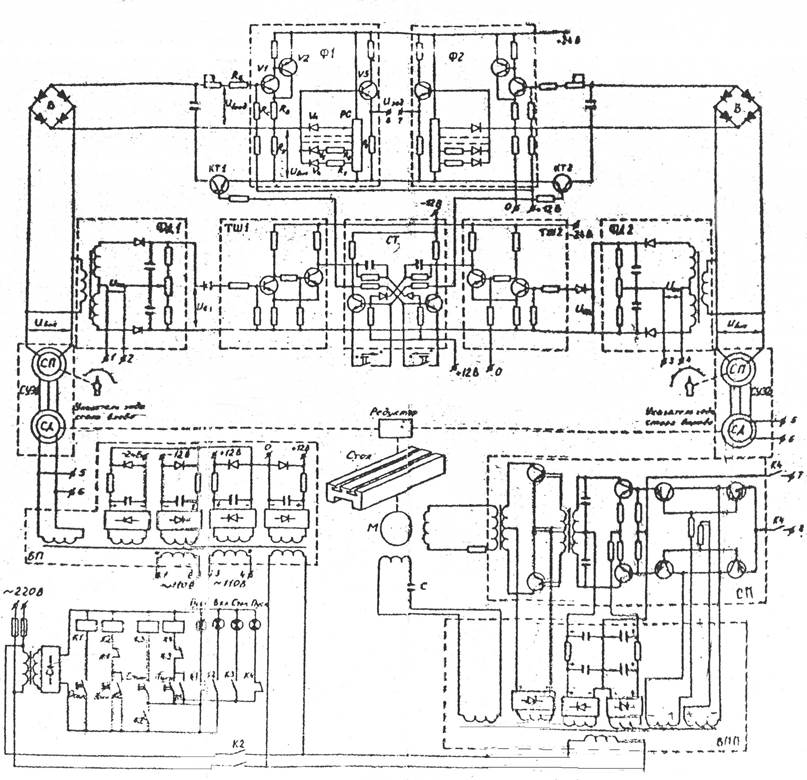
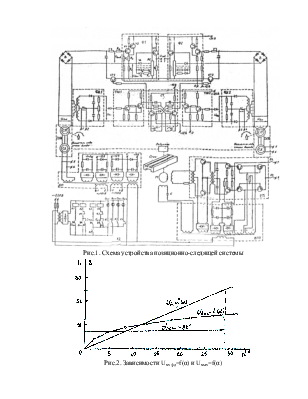
Рис.1. Схема устройства позиционно-следящей системы
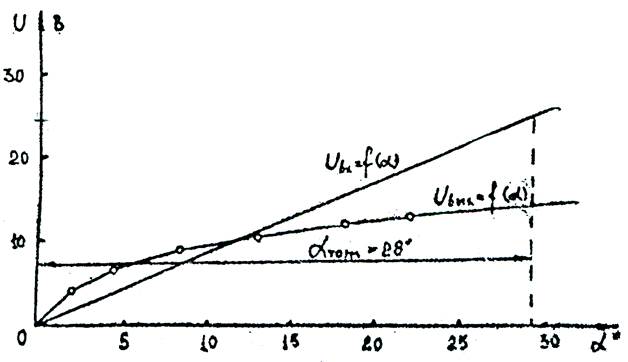
Рис.2. Зависимости Uвх фд=f(α) и Uвых=f(α)
|
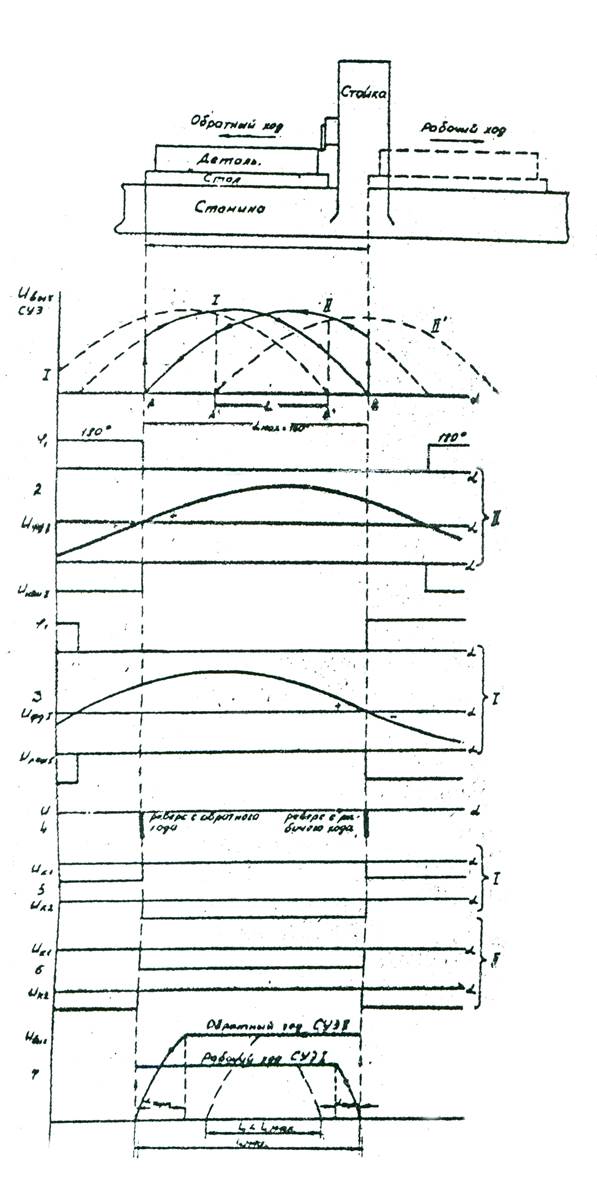
Рис.3. Диаграммы выходного задающего
Описание схемы лабораторного стенда
В современных крупных металлорежущих станках, учитывая их большие габариты, целесообразно сосредоточить управление станка в одном месте, а также ввести дистанционное задание технологических и размерных параметров.
В работе рассматривается один из вариантов
дистанционного задания хода стола и формирования оптимального графика его
перемещения. Оптимальному графику движения стола с учётом ограничения потерь в
приводном двигателе соответствуют параболическое изменение скорости во времени
в период разгона и замедления. При осуществлении такого графика необходимо
также учитывать ограничение ускорений величиной не более 2м/с2. При
этом точность прихода стола в точку изменения направления движения должна быть
не более 10 ÷ 20 мм независимо от установленной скорости движения стола. На
рис.1 приведена схема устройства позиционно-следящей системы, выполненной
полностью на бесконтактных элементах с ограничением скорости отработки
перемещения величиной заданной скорости рабочего или обратного хода и
принудительным заданием темпа замедления при подходе стола и точки изменения
направления движения. Это достигается с помощью плавного изменения задающего
напряжения по закону ![]() где
где
Uзад – напряжение, задающее скорость движения электропривода;
k – коэффициент пропорциональности;
a – расчётное ускорение;
s – расстояние до точки изменения направления движения.
Задатчиком величины перемещения стола в системе является сельсинный управляемый элемент – СУЭ (например, СУЭ1 или СУЭ2). Он состоит из сельсина-датчика – СД и сельсина-приёмника – СП. Ротор СД через редуктор связан с двигателем стола, а ротор СП – с рукояткой переключателя задания длины хода стола. Напряжение однофазной обмотки СП, расположенной на роторе и работающей в трансформаторном режиме, определяется Uвых=Um·sinα, где α – угол между роторами СП и СД, Um – амплитуда напряжения однофазной обмотки СП. Отсюда следует, что величина и фаза напряжения однофазной обмотки СП зависит от угла рассогласования α, причём при α=0 и 180° напряжение Uвых=0, а при переходе угла α через 0° и 180° фаза напряжения обмотки СП изменяется на 180°.
Однофазная обмотка СП соединена с формирователем Ф и с фазовым дискриминатором ФД. Фазовый дискриминатор предназначен для определения момента перехода угла рассогласования роторов СП и СД через 0°, а тем самым для фиксирования прихода стола в точку изменения направления его движения. Напряжение на выходе ФД пропорционально Uвых СП и имеет знак, зависящий от его фазы. Если входной сигнал Uвх равен нулю, то в положительный полупериод опорного напряжения Uоп вентили проводят одинаковые токи, на обоих резисторах будут одинаковые напряжения, а, следовательно, выходное напряжение ФД будет равно нулю. Во второй полупериод Uоп оба вентиля закрыты. При Uвх≠0 на выходе ФД появляется напряжение, величина и знак которого будет определяться разностью токов, проходящих по резисторам. То есть Uфд =2·k·Uвх m·sinα. Знак Uфдбудет меняться при переходе напряжения Uвых СП через ноль.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.