В промышленных системах регулирования управляющая переменнаяреализуется исполнительным устройством, мощность которого определяется установившимися режимами. Поэтому U(0) характеризует требуемую кратность запаса мощности исполнительного устройства. Эта кратность должна быть не очень большой, чтобы не удорожать систему регулирования.
В электронных устройствах U(0) может значительно превышать установившееся значение Uуст, если входные цепи объекта не входят в насыщение, и малое квантованное значение установившегося значения Uуст обеспечивает достаточную точность регулирования. В промышленных технологических объектах само исполнительное устройство, реализующее U(0), имеет ограничения. Например, задвижка регулирования потока, или регулируемый электропривод, где и преобразователь и двигатель имеют ограничения по напряжению.
Среднеквадратичное изменение управляющей переменной (затраты на управление)
где Δu(k)=u(k)-uуст - отклонение управляющей переменной от установившегося значения. Этот показатель характеризует затраты на управление (работу исполнительного механизма) на протяжении всего учитываемого времени моделирования.
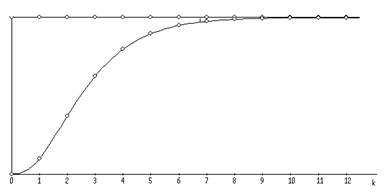
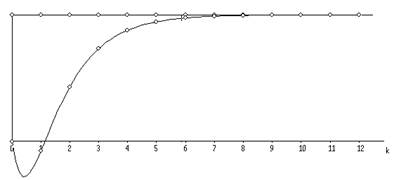
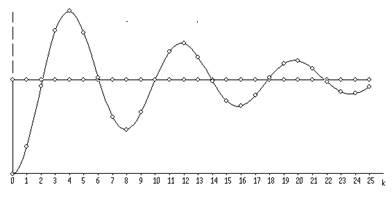
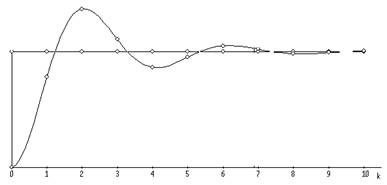
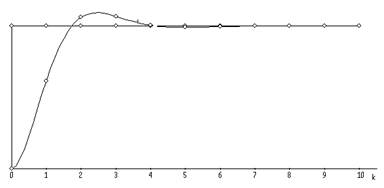
B.5. В данном курсе лабораторных работ исследуются объекты, показанные в таблице 1. По виду переходной характеристики можно судить о свойствах объекта. Объекты второго - третьего порядка имеют пологое начало переходной характеристики. Объекты с неминимально-фазовой характеристикой имеют отрицательный выброс в начале характеристики. У колебательных объектов степень затухания определяется коэффициентом затухания e, а период колебаний определяется следующим соотношением:

|
Таблица В.1. Переходные характеристики и передаточные функции объектов разных типов. (для упрощения принят К=1) |
||||
|
|
Объект второго – третьего порядка |
|||
|
|
Объект с неминимальнофазовой характеристикой |
|||
|
|
Колебательный объект с коэффициентом затухания e=0,1 |
|||
|
|
Колебательный объект с коэффициентом затухания e=0,3 |
|||
|
|
Колебательный объект с коэффициентом затухания e=0,6 |
|||
B.6. Особенности работы с программой моделирования.
После выбора объекта через "Тип управляемого объека" экран во вкладке «Параметры объекта» показывает его переходную характеристику по управлению для заданных по умолчанию параметров, а также параметры а1, а2, в1, в2 его дискретной передаточной функции Gр(z). Здесь вводят заданные параметры объекта и такт квантования, который надо определить по переходной характеристике объекта.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.