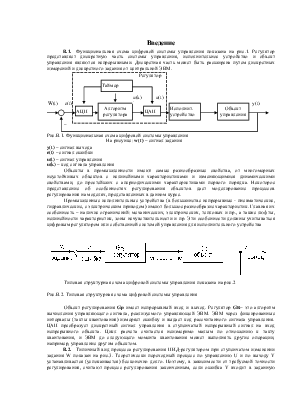
B.1. Функциональная схема цифровой системы управления показана на рис.1. Регулятор представляет дискретную часть системы управления, исполнительное устройство и объект управления являются непрерывными. Дискретная часть может быть расширена путем дискретных измерений и дискретного задания от центральной ЭВМ.
Рис.В.1. Функциональная схема цифровой системы управления
На рисунке:w(t) – сигнал задания
y(t) – сигнал выхода
e(t) – сигнал ошибки
u(t) – сигнал управления
u(k) – код сигнала управления
Объекты в промышленности имеют самые разнообразные свойства, от многомерных неустойчивых объектов с нелинейными характеристиками и изменяющимися динамическими свойствами, до простейших с апериодическими характеристиками первого порядка. Некоторое представление об особенностях регулирования объектов дает моделирование процессов регулирования на моделях, представленных в данном курсе.
Промышленные исполнительные устройства (в большинстве непрерывные - пневматические, гидравлические, с электрическим приводом) имеют большое разнообразие характеристик. Главная их особенность – наличие ограничений: механических, электрических, тепловых и пр., а также люфты, нелинейности характеристик, зоны нечувствительности и пр. Эти особенности должны учитываться цифровым регулятором или собственной системой управления для исполнительного устройства
Типовая структурная схема цифровой системы управления показана на рис.2
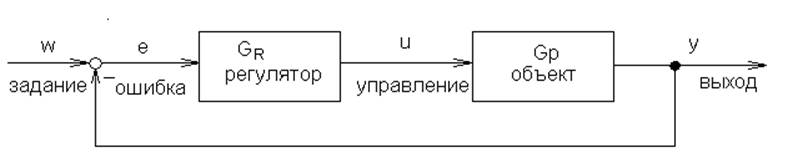
Рис.В.2. Типовая структурная схема цифровой системы управления
Объект регулирования Gp имеет непрерывный вход и выход. Регулятор GR– это алгоритм вычисления управляющего сигнала, реализуемого управляющей ЭВМ. ЭВМ через фиксированные интервалы (такты квантования) измеряет ошибку и выдает код рассчитанного сигнала управления. ЦАП преобразует дискретный сигнал управления в ступенчатый непрерывный сигнал на вход непрерывного объекта. Цикл расчета считается неизмеримо малым по отношению к такту квантования, и ЭВМ до следующего момента квантования может выполнять другие операции, например, управление другим объектом.
B.2. Типичный вид процесса регулирования ПИД-регулятором при ступенчатом изменении задания W показан на рис.3. Теоретически переходный процесс по управлению U и по выходу Y устанавливается (успокаивается) бесконечно долго. Поэтому, в зависимости от требуемой точности регулирования, считают процесс регулирования законченным, если ошибка Y входит в заданную точность. Здесь принята 3%-я точность, поэтому процесс регулирования закончился на восьмом такте.
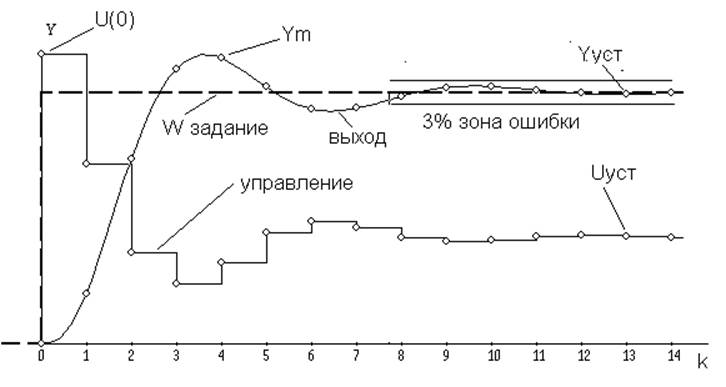
Рис.В.3. Пример процесса регулирования.
B.3. Показатели качества регулирования по управляемой (выходной) переменной позволяют объективно сравнивать между собой различные процессы регулирования.
В реальных объектах любая ошибка – это несоответствие выхода заданному значению (не рабочая температура, не заданный состав смеси, не заданная скорость перемещения, не достигнутая позиция рабочего инструмента, и т.д.). Это удлиненные периоды выхода в рабочий режим, брак, потеря рабочего времени и т.д. Особенно велики неизбежные ошибки на первых тактах переходного процесса (на Рис.3 это е(1)»0,8 и е(2) »0,3).
Динамическая ошибка регулирования (или перерегулирование) - этоотносительное превышение максимального значения выхода Ym над заданием W:
|
eдин= |
Ym-W |
|
W |
При большой динамической ошибке регулируемая величина может превысить максимально допустимое значение. Например, при разгоне на максимальную рабочую скорость вращения (10000 об/мин) с перерегулированием eдин=0,3 (13000 об/мин)можно превысить максимально допустимую скорость (например, 12000 об/мин), что может привести к аварии из-за больших центробежных сил. Поэтому важно соблюдать ограничения по динамической ошибке.
Время регулирования tРЕГ определяется как время, от начала переходного процесса до такта, с которого значения регулируемого параметра Y(k) входят в заданную точность регулирования 3%, т.е. ошибка регулирования становится меньше заданной |e(k)| < 0.03W, и объект регулирования начинает работать в заданном режиме, например, без брака.
Время достижения заданного значения tW – время от начала переходного процесса до момента, когда выход Y первый раз достигает заданное значение W. Иногда важно, чтобы объект быстрее вышел на заданный режим, даже если время регулирования будет увеличенным.
Статическая ошибка регулирования определяет разность между установившимся значением регулируемого параметра Yуст и его заданным значением W:
|
eст= |
Yуст-W |
|
W |
Обычно процессы регулирования со статической ошибкой получаются с регулятором без интегральной составляющей (рис.4.). Для уменьшения статической ошибки приходится увеличивать коэффициент усиления. Это приводит к большим долго не затухающим колебаниям процесса. Поэтому установившееся значение можно оценивать как среднее значение выхода на последних татах моделирования.
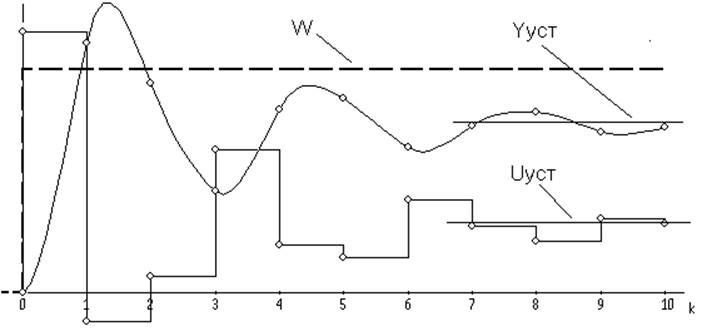
Рис.В.4. Пример процесса регулирования со статической ошибкой
Среднеквадратичная ошибка регулируемой величины (ошибка выхода)
где N=Tмод/T0 - количество учитываемых тактов квантования, зависящее от длительности такта квантования T0 и от времени моделирования Tмод, которое принимают одинаковым для всех сравниваемых переходных процессов.
Этот интегральный показатель учитывает сумму всех ошибок выхода объекта от начала до окончания регулирования, и косвенно учитывает все вышеприведенные показатели.
B.4. Показатели качества регулирования по управляющей переменной позволяют учитывать режим работы регулятора в процессе регулирования.
Начальное значение управляющей переменной - U(0) при ступенчатом изменении сигнала задания W(0) - это относительное превышение сигнала управления на нулевом такте к=0 над установившимся значением Uуст.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.