состоит из объекта управления, микроконтроллера, пульта управления и аппаратуры их взаимной связи. Микроконтроллер (МК) путем периодического опроса принимает информацию об объекте от аналоговых и цифровых датчиков. Выходные сигналы датчиков вследствие их различной физической природы могут потребовать промежуточного преобразования на аналого-цифровых преобразователях (АЦП) или на схемах формирователей сигналов (ФС), которые чаще всего выполняют функции гальванической развязки и формирования уровней двоичных сигналов стандарта ТТЛ.
МК с требуемой периодичностью вырабатывает управляющие сигналы на своих выходных портах. Некоторая часть управляющих сигналов интерпретируется как совокупность простых двоичных сигналов управления, которые через схемы формирователей сигналов (усилители мощности, реле, оптроны и т.п.) поступают на исполнительные устройства. Другая часть управляющих сигналов представляет собой многоразрядные двоичные коды, которые через цифро-аналоговые преобразователи (ЦАП) воздействуют на исполнительные устройства аналогового типа.
Структура МКС
С помощью пульта управления (ПУ) оператор получает возможность управлять работой МКС и контролировать ее функционирование: запускать МКС, получать значения некоторых сигналов, снимать с индикаторов информацию о состоянии объекта и т.п. С помощью интерфейса МКС может передавать обработанную информацию на центральный компьютер по его запросу.
Разработка структурной схемы МКС.
Структурная схема
разрабатываемой схемы МКС приведена на рис 1.1 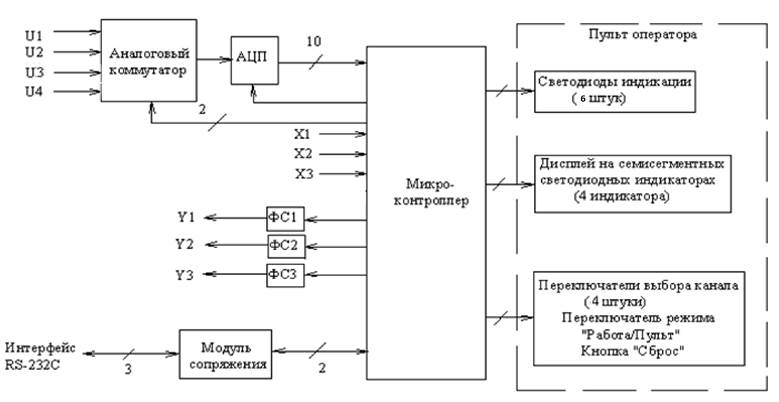
рис.1.1 Структурная схема МКС
Ее центральной частью является однокристальный микроконтроллер AT89C51, имеющий внутреннюю память программ объемом 4 Кбайт и 32 двунаправленных линий ввода/вывода. МК имеет 2 таймера: Т/С0 и Т/С1. Таймер Т/С0 используется для отсчета времени Топр, а таймер Т/С1 используется для задания требуемой скорости обмена 4800 бит/с по интерфейсу RS-232C.
Аналоговые сигналы U1,U2,U3 через коммутатор (аналоговый мультиплексор) поступают на АЦП. С выхода АЦП 8-разрядный код поступает в МК. МК выдает адрес для выбора канала коммутатора, а также сигнал для запуска АЦП.
Цифровые (двоичные) сигналы X1,X2,X3,Х4,Х5 поступают на входы МК. Управляющие сигналы Y1,Y2 и Y3, представляющие собой одиночные импульсы определенной длительности, вырабатываются микроконтроллером. Они усиливаются по току с помощью формирователей сигналов ФС1, ФС2, ФС3.
Сигналы последовательного интерфейса TxD (передаваемые данные) и RxD (принимаемые данные) вырабатываются последовательным портом (УАПП) микроконтроллера. Для преобразования их в сигналы интерфейса RS-232c служит блок сопряжения.
Пульт оператора включает в себя: 6 светодиодов для индикации значений сигналов X1,X2,X3,Х4,Х5,Y1,Y2,Y3; четырехпозиционный линейный дисплей на семисегментных светодиодных индикаторах для отображения аналоговых сигналов (напряжений) U1,U2,U3,; 3 переключателя для выбора аналоговых каналов; переключатель режима работы МКС; кнопку “Сброс”, при нажатии на которую производится сброс МК.
2. Разработка принципиальной схемы МКС.
Цоколевка AT89C51:
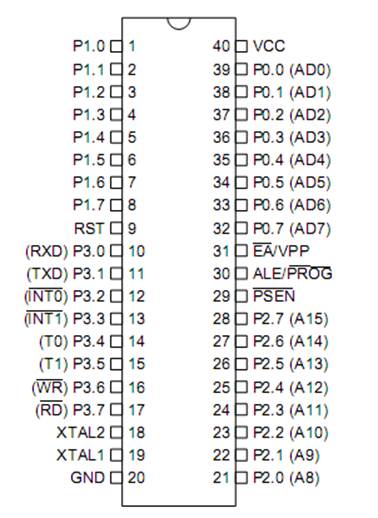
Vcc – напряжение питания
GND – общий вывод (земля)
Р0 – 8-разрядный двунаправленный порт ввода/вывода с открытым стоком.
Р1 – 8-разрядный двунаправленный порт ввода/вывода со встроенными «подтягивающими» резисторами Порт Р1 также используется для приема младшего байта адреса при программировании и проверке памяти программ.
Р2 – 8-разрядный двунаправленный порт ввода/вывода с встроенными «подтягивающими» резисторами..
При обращениях к внешней памяти данных, если используется 16-разрядная адресация (MOVX @DPTR), порт Р2 содержит старший байт адреса. В этом применении используется сильное «подтягивание» к шине питания при выводе единиц. Если доступ к внешней памяти данных осуществляется с использованием 8-разрядной адресации (MOVX @RI), то на выводы порта выдается содержимое регистра специальных функций Р2.
Порт Р2 также используется для приема старших бит адреса и некоторых управляющих сигналов при программировании и проверке флэш-памяти программ.
Р3 – восьмиразрядный двунаправленный порт ввода/вывода.
Кроме вышеперечисленного, порт Р3 используется также для приема некоторых управляющих сигналов при программировании и проверке флэш-памяти программ.
|
Вывод порта |
Альтернативная функция |
|
Р3.0 |
RxD (вход последовательного порта) |
|
Р3.1 |
TxD (выход последовательного порта) |
|
Р3.2 |
|
|
Р3.3 |
|
|
Р3.4 |
T0 (внешний вход таймера 0) |
|
Р3.5 |
T1 (внешний вход таймера 1) |
|
Р3.6 |
|
|
Р3.7 |
|
Вход сброса. Высокий уровень на этом выводе в течении 2х машинных циклов при работающем тактовом генераторе сбрасывает микроконтроллер.
Сигнал действительности адреса – импульс, который
выдается для защелкивания младшего байта адреса при обращениях к внешней
памяти. Этот вывод также используется как вход для импульса разрешения программирования
флэш-памяти (![]() ).
).
При нормальной работе на данном выводе присутствует неизменная
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.