
























7.4. Ввод в МКС аналоговых сигналов
При работе с объектами управления данные в МКС поступают от датчиков, сигналы которых обычно имеют аналоговую форму. Для того, чтобы МКС могла воспринимать информацию о некотором параметре управляемого процесса, например, температуре, необходимо сначала преобразовать аналоговый сигнал (напряжение или ток) в цифровую форму, так как МК работает только с цифровыми сигналами. Это преобразование осуществляется с помощью аналого-цифрового преобразователя (АЦП). Некоторые типы МК имеют в своем составе встроенные АЦП. Однако МК семейства MCS-51, выпускаемые в странах СНГ (см. табл. 4.1), не имеют внутреннего АЦП. Поэтому для ввода аналоговых сигналов в такие МК используются отдельные микросхемы АЦП. Выпускаются различные типы АЦП, которые характеризуются большим количеством параметров. Однако, основными параметрами, определяющими метод сопряжения АЦП и МК, являются всего два:
1) разрядность выходного кода nАЦП;
2) быстродействие АЦП.
Разрядность nАЦП определяется количеством разрядов двоичного кода, вырабатываемого на выходе АЦП.
Быстродействие АЦП оценивается временем преобразования tПР, которое определяется как промежуток времени от момента запуска АЦП до момента появления выходного кода.
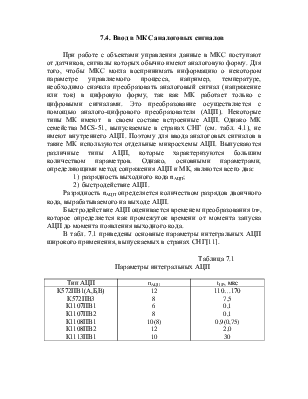
В табл. 7.1 приведены основные параметры интегральных АЦП широкого применения, выпускаемых в странах СНГ[11].
Таблица 7.1
Параметры интегральных АЦП
|
Тип АЦП |
nАЦП |
tПР, мкс |
|
К572ПВ1(А,Б,В) К572ПВ3 К1107ПВ1 К1107ПВ2 К1108ПВ1 К1108ПВ2 К1113ПВ1 |
12 8 6 8 10(8) 12 10 |
110…170 7,5 0,1 0,1 0,9(0,75) 2,0 30 |
Все АЦП по величине времени преобразования можно разделить на две группы: быстродействующие или, более кратко, быстрые АЦП и медленнодействующие или медленные АЦП. Это деление на соотношении времени преобразования АЦП и времени выполнения команд пересылки МК, которые используются для управления вводом информации из АЦП. Так, если tПР меньше или примерно равно tК (времени выполнения команды в МК), то АЦП будет считаться «быстрым». Если же tПР значительно больше tК, то АЦП будет «медленным». Конечно, это соотношение определяется типом МК и тактовой частотой его работы. Например, для MCS-51 при тактовой частоте fCLK 12 МГц время выполнения основных команд пересылки составляет 1 мкс. Таким образом, для MCS-51 АЦП типа К1113ПВ1 будет «медленным», а К1108ПВ1 – «быстрым».
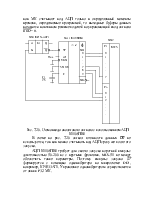
Для выбора способа подключения АЦП к МК существенное значение имеют сигналы управления и состояния АЦП. Большинство АЦП в интегральном исполнении имеет много общего. На рис. 7.16 приведено условное графическое обозначение типового АЦП.
Рис. 7.16. Условное графическое обозначение типового АЦП
АЦП имеет следующие основные входы и выходы:
· вход аналогового напряжения – AI (на этот вход подается преобразуемое аналоговое напряжение UВХ);
· цифровой выход – DO (с этого выхода считывается двоичный код после завершения преобразования). В данном примере выходной код десятиразрядный, разряды нумеруются, начиная с младшего, DO.0, DO.1,…,DO.9. Выходы АЦП имеют буферы с тремя состояниями;
· вход запуска АЦП – ST (Start). Сигнал запуска имеет форму импульса определенной длительности. Он выполняет сброс (начальную установку) внутренних узлов АЦП и запускает процесс аналого-цифрового преобразования;
·
сигнал
готовности выходных данных - ![]() (Data Ready). Он,
по-другому, называется «Конец преобразования». Этот сигнал информирует о том,
что процесс преобразования входного аналогового напряжения в цифровой код
закончился;
(Data Ready). Он,
по-другому, называется «Конец преобразования». Этот сигнал информирует о том,
что процесс преобразования входного аналогового напряжения в цифровой код
закончился;
·
входной
сигнал разрешения вывода данных – ![]() (Output Enable). Он
управляет состоянием выходных буферов данных. При
(Output Enable). Он
управляет состоянием выходных буферов данных. При ![]() = 1 выходные
буферы находятся в Z-состоянии.
При
= 1 выходные
буферы находятся в Z-состоянии.
При ![]() = 0 выходные
буферы переходят в активное состояние, и на выводах DO.0…DO.9 микросхемы
появляется выходной код;
= 0 выходные
буферы переходят в активное состояние, и на выводах DO.0…DO.9 микросхемы
появляется выходной код;
· вход тактового (синхронизирующего) сигнала – CLK (Clock). Он тактирует все внутренние узлы АЦП и задает длительность такта преобразования, а следовательно и время преобразования.
На рис. 7.16 с целью упрощения не показаны выводы подачи напряжений питания для внутренних схем АЦП.
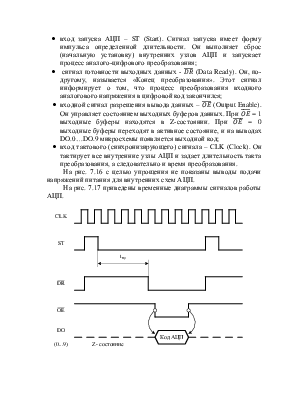
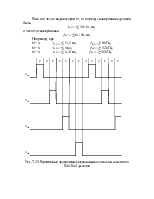
На рис. 7.17 приведены временные диаграммы сигналов работы АЦП.
Рис. 7.17. Временные диаграммы сигналов работы типового АЦП
Высокий уровень импульса запуска на
входе ST сбрасывает
все внутренние узлы АЦП в исходное состояние, при этом сигнал на выводе ![]() становится
высокого уровня. По срезу импульса ST начинается аналого-цифровое
преобразование. При истечении времени tПР, когда
преобразование аналогового напряжения в цифровой код завершилось, сигнал на
выводе
становится
высокого уровня. По срезу импульса ST начинается аналого-цифровое
преобразование. При истечении времени tПР, когда
преобразование аналогового напряжения в цифровой код завершилось, сигнал на
выводе ![]() становится
низкого уровня (логический 0), информируя о готовности выходных данных. Однако
цифровой код не появляется на выводах DO.0…DO.9 микросхемы, так
как выходные буферы данных находятся в Z-состоянии, что определяется
высоким уровнем сигнала (логическая 1) на входе
становится
низкого уровня (логический 0), информируя о готовности выходных данных. Однако
цифровой код не появляется на выводах DO.0…DO.9 микросхемы, так
как выходные буферы данных находятся в Z-состоянии, что определяется
высоким уровнем сигнала (логическая 1) на входе ![]() . Когда на этом
входе будет низкий уровень (
. Когда на этом
входе будет низкий уровень (![]() = 0), выходные
буферы данных открываются, и на выводах DO.0…DO.9 появляется
двоичный код АЦП.
= 0), выходные
буферы данных открываются, и на выводах DO.0…DO.9 появляется
двоичный код АЦП.
Рассмотрим примеры интерфейса АЦП и МК, т.е. комплекс схемных и программных средств для их сопряжения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.