3.5. Динамическая модель машинного агрегата
Для упрощения решения вопросов динамики реальная схема машинного агрегата автобуса заменяется одномассовой эквивалентной динамической моделью. Используем динамическую модель с вращающимся звеном приведения, в качестве которого принят кривошип 1 (рис. 3.4)
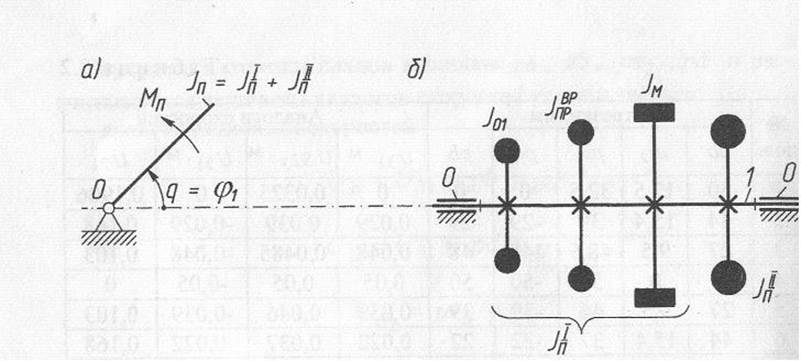
Рис.3.4
Закон движения звена приведения
должен быть таким же, как и у кривошипа 1 рычажного механизма, т.е. обобщенная
координата ![]() , угловая скорость
, угловая скорость ![]() , угловое ускорение
, угловое ускорение ![]() . Для этого все инерционные параметры звеньев механизма
заменяем приведенным моментом инерции
. Для этого все инерционные параметры звеньев механизма
заменяем приведенным моментом инерции ![]() , а силовые параметры на звеньях заменяются приведенным
моментом сил
, а силовые параметры на звеньях заменяются приведенным
моментом сил ![]() .
.
Приведенный момент инерции ![]() - это условный момент инерции звена приведения,
кинематическая энергия
- это условный момент инерции звена приведения,
кинематическая энергия ![]() которого равна сумме кинетических энергий
которого равна сумме кинетических энергий ![]() всех подвижных звеньев машинного агрегата, т.е
всех подвижных звеньев машинного агрегата, т.е ![]() , или
, или
 ,
, ![]()
Приведенный момент инерции ![]() представляем в виде двух частей (рис. 3.4, б)
представляем в виде двух частей (рис. 3.4, б)
![]() , где
, где ![]() -
постоянная составляющая
-
постоянная составляющая ![]() от вращающихся
звеньев с постоянными передаточными отношениями u = i = const,
поэтому
от вращающихся
звеньев с постоянными передаточными отношениями u = i = const,
поэтому ![]() ;
;
![]() -
переменная составляющая
-
переменная составляющая ![]() от звеньев с
переменными аналогами скоростей i=u.
от звеньев с
переменными аналогами скоростей i=u.
Постоянная ![]() в соответствии с рис.3.4, б
состоит из следующих слагаемых:
в соответствии с рис.3.4, б
состоит из следующих слагаемых:
![]() , где
, где ![]() -
момент инерции кривошипа 1,
-
момент инерции кривошипа 1,
![]()
![]()
![]() -
приведенный к валу 1 момент инерции вращающихся звеньев машины.
-
приведенный к валу 1 момент инерции вращающихся звеньев машины.
![]()
![]() ,
,
![]() -
известная составляющая
-
известная составляющая ![]() ,
,
![]()
![]() ;
;
![]() -
момент инерции маховика.
-
момент инерции маховика.
3.6. Определение переменной составляющей приведенного момента инерции
Переменная составляющая ![]() приведенного момента инерции
определяется из равенства кинетических энергий звена приведения 1 и звеньев 2,
3, 4, 5 рычажного механизма
приведенного момента инерции
определяется из равенства кинетических энергий звена приведения 1 и звеньев 2,
3, 4, 5 рычажного механизма

Так для звена 4 ![]() ,
, ![]() ,
то равенства кинетических энергий в соответствии со схемой запишется так
,
то равенства кинетических энергий в соответствии со схемой запишется так
 .
.
Отсюда
где ![]()
![]()
![]()
![]() .
.
Рассчитаем ![]() для положения №8:
для положения №8:
![]()
![]() ,
,
![]()
![]() ,
,
![]()
![]() ,
,
![]()
![]() ,
,
![]()
![]() .
.
Результаты расчетов ![]() для остальных 12-ти положений
представлены в табл. 3.3. По результатам расчетов строим график переменной
составляющей
для остальных 12-ти положений
представлены в табл. 3.3. По результатам расчетов строим график переменной
составляющей ![]() в функции угла
в функции угла ![]() (поз. 4. лист 1).
(поз. 4. лист 1).
Масштабный коэффициент момента инерции
![]()
 .
.
Ординаты графика  ,
,  ,
,
 ,
,  ,
,
 сводим в табл. 3.3.
сводим в табл. 3.3.
Таблица 3.3
|
№ пол. |
A,
|
мм |
B,
|
мм |
C,
|
мм |
D,
|
мм |
|
|
|
1 |
0,00779 |
38,9 |
0,00314 |
15,7 |
0 |
0 |
0 |
0 |
0,01093 |
54,7 |
|
2 |
0,01125 |
56,3 |
0,00240 |
12 |
0,00284 |
14,2 |
0,00106 |
5,3 |
0,01755 |
87,8 |
|
3 |
0,01720 |
86 |
0,00080 |
4 |
0,00721 |
36,1 |
0,00402 |
20,3 |
0,02923 |
146,2 |
|
4 |
0,01843 |
92,2 |
0 |
0 |
0,00736 |
36,8 |
0,00736 |
36,8 |
0,03315 |
165,8 |
|
5 |
0,01444 |
72,2 |
0,00080 |
4 |
0,00405 |
20,3 |
0,00721 |
36,1 |
0,0265 |
132,5 |
|
6 |
0,00967 |
48,4 |
0,00240 |
12 |
0,00106 |
5,3 |
0,00284 |
14,2 |
0,01597 |
79,9 |
|
7 |
0,00779 |
38,9 |
0,00314 |
15,7 |
0 |
0 |
0 |
0 |
0,01093 |
54,7 |
|
8 |
0,00967 |
48,4 |
0,00240 |
12 |
0,00106 |
5,3 |
0,00284 |
14,2 |
0,01597 |
79,9 |
|
9 |
0,01444 |
72,2 |
0,00080 |
4 |
0,00405 |
20,3 |
0,00721 |
36,1 |
0,0265 |
132,5 |
|
10 |
0,01843 |
92,2 |
0 |
0 |
0,00736 |
36,8 |
0,00736 |
36,8 |
0,03315 |
165,8 |
|
11 |
0,01720 |
86 |
0,00080 |
4 |
0,00721 |
36,1 |
0,00405 |
20,3 |
0,02923 |
146,2 |
|
12 |
0,01125 |
56,3 |
0,00240 |
12 |
0,00284 |
14,2 |
0,00106 |
5,3 |
0,01755 |
87,8 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.