Определяем число зубьев ведущей Z1 и ведомой Z2 звездочки:
![]() (3.4.6)
(3.4.6)
Принимаем Z1=14.
![]() (3.4.7)
(3.4.7)
Принимаем Z2=15.
Делительные диаметры звёздочек, мм:
 (3.4.8)
(3.4.8)
 , (3.4.9)
, (3.4.9)
гдеРt – шаг цепи, мм;
Определим усилие которое необходимо вращения валика, кН:
![]() (3.4.10)
(3.4.10)
![]() (3.4.11)
(3.4.11)
где ![]() - коэффициент трения качения;
- коэффициент трения качения;
![]() и
и ![]() - масса полного и пустой тележки, т.
- масса полного и пустой тележки, т.
![]()
Мощность рабочей машины необходимая для работы привода при полной нагрузке:
 ; (3.4.12)
; (3.4.12)

Момент сопротивления рабочей машины:
 (3.4.14)
(3.4.14)
Момент трогания рабочей машины:
![]() (3.4.15)
(3.4.15)
Время работы привода t1, время смены пиломатериалов t2:
 ; (3.4.16)
; (3.4.16)
время
определяемое опытным путем![]() ;
;
Построим механическую характеристику и нагрузочную диаграмму рабочей машины.
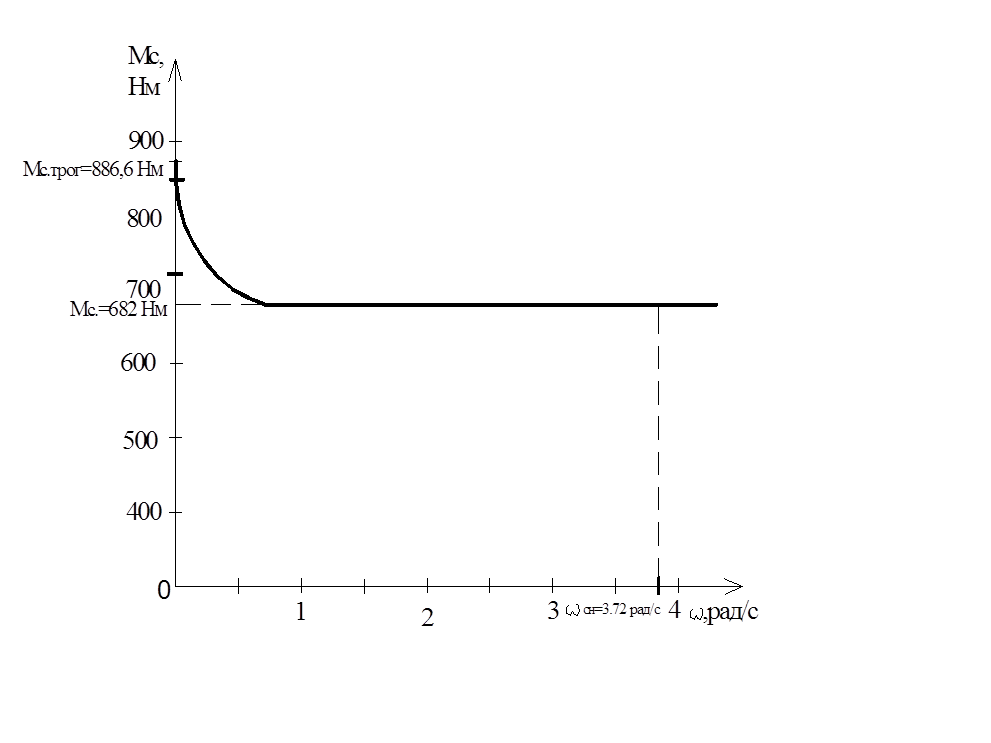
Рисунок 3.4.1 Механическая характеристика рабочей машины
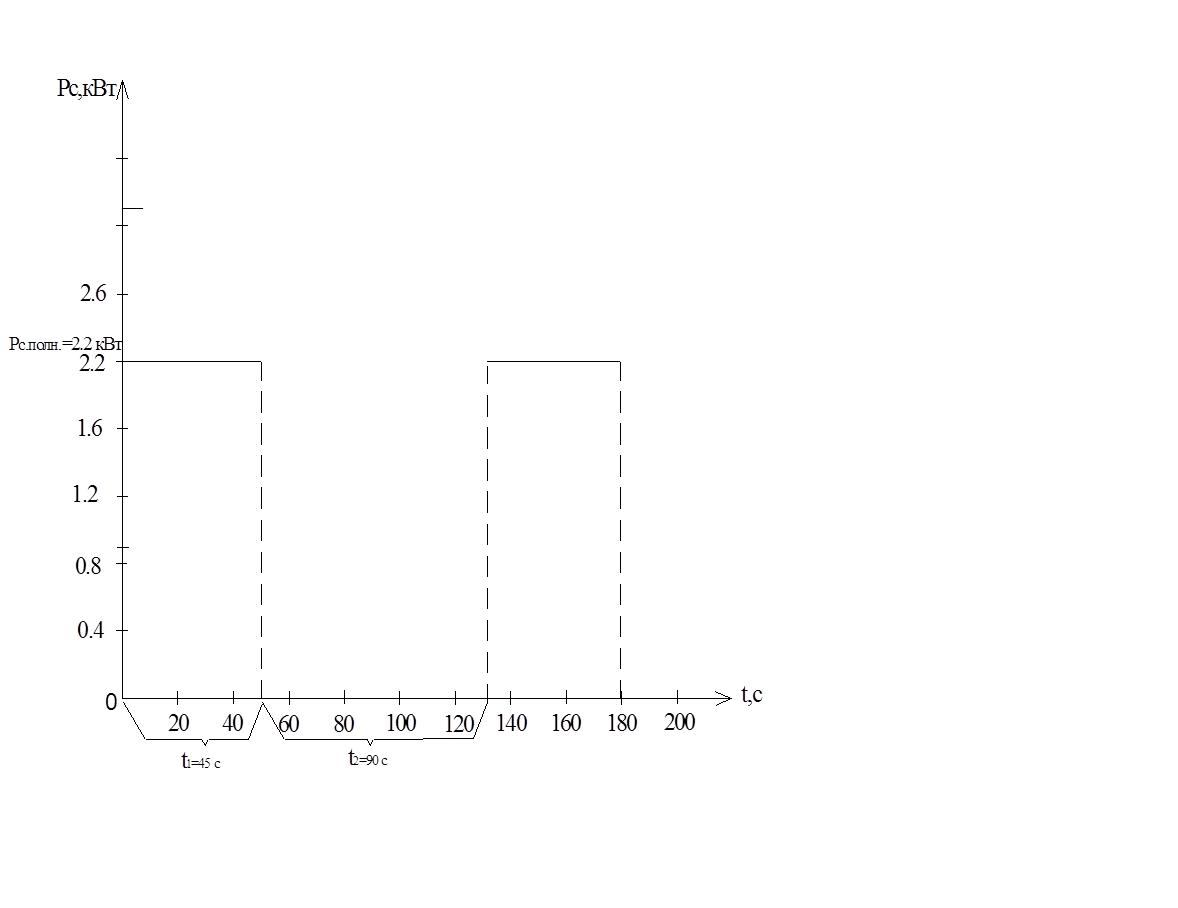
Рисунок 3.4.2 Нагрузочная диаграмма рабочей машины
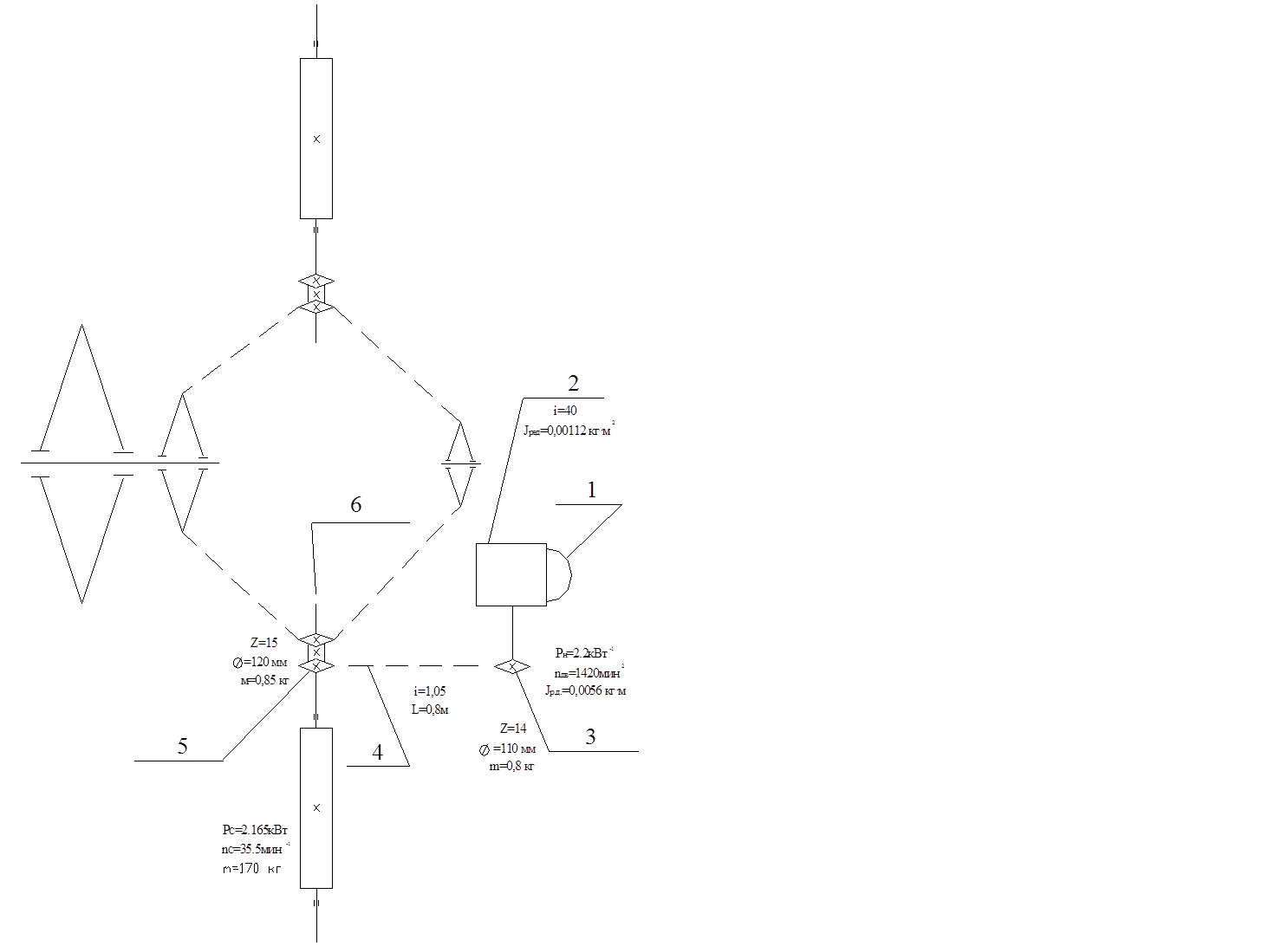 Рисунок 3.4.3 Кинематическая
схема станка
Рисунок 3.4.3 Кинематическая
схема станка
Момент инерции редуктора Jред определяем по формуле:
![]() (3.4.17)
(3.4.17)
Момент инерции ведущей звездочки J:
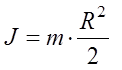 (3.4.18)
(3.4.18)
где m-масса звездачки, кг;
R-радиус звездочки, м.

Момент инерции двух вальцов Jвал , так как они одинаковые рассчитаем для одного:
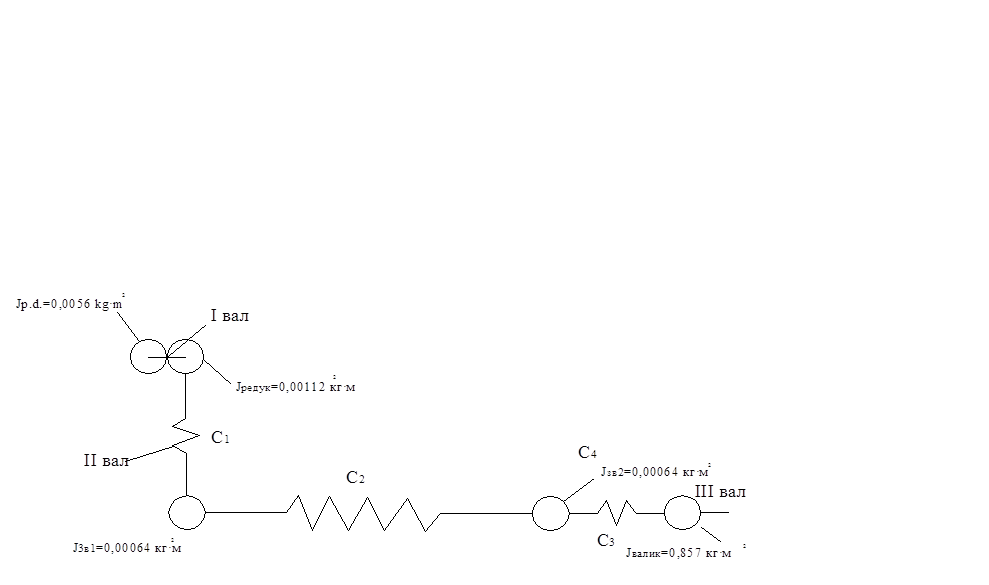
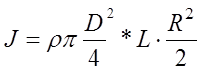 (3.4.18)
(3.4.18)
где р- плотность метала, p=7800 кг/m3;
D – диаметр вала, м;
L – длина вала, м;
R-радиус звездочки, м.

Рисунок 3.4.4 Исходная расчетная схема механической части

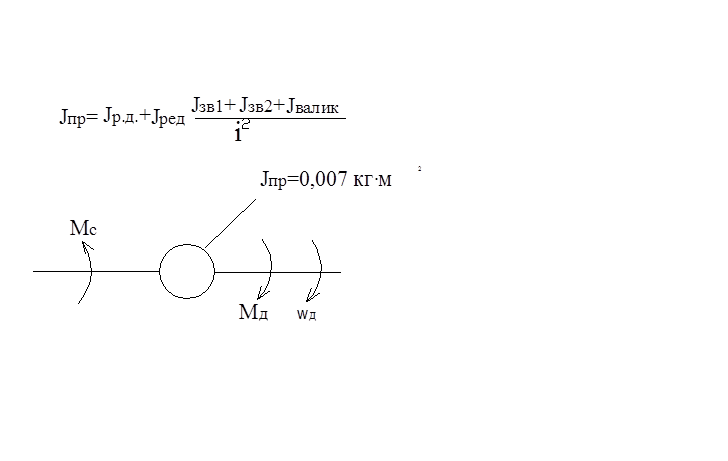
Рисунок 3.4.5 Приведенная одномассовая схема
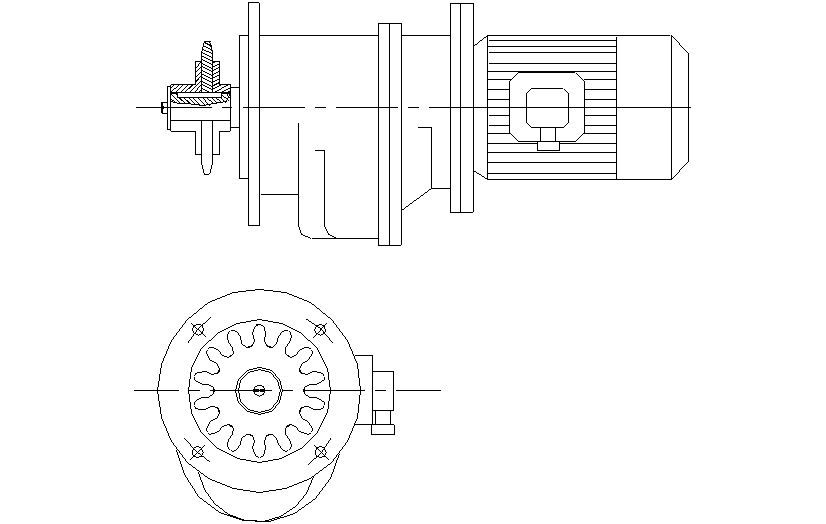
Рисунок 3.4.6 Приводная станция в сборе
Построим механическую характеристику электродвигателя, для этого определим некоторые значения.
Номинальный момент:
![]() (3.4.19)
(3.4.19)
де ![]() номинальная
угловая скорость,
номинальная
угловая скорость, ![]() ;
;
![]() (3.4.20)
(3.4.20)
![]()
Определяем
коэффициент ![]() , который
находится в сложной зависимости от скольжения
, который
находится в сложной зависимости от скольжения ![]() . Изобразим
изменение коэффициента
. Изобразим
изменение коэффициента ![]() в виде
ломаной линии на рисунке 15, вычислив его значение в четырех характерных
точках:
в виде
ломаной линии на рисунке 15, вычислив его значение в четырех характерных
точках:
1)
при ![]() имеем
имеем ![]() , а коэффициент
, а коэффициент ![]() ;
;
2)
при ![]() имеем
имеем ![]() , а коэффициент
, а коэффициент ![]() ;
;
3)
при ![]() имеем
имеем ![]() , а коэффициент
, а коэффициент ![]() ;
;
4)
при ![]() имеем
имеем ![]() , а коэффициент
, а коэффициент ![]() .
.
Значения «![]() » в этих
уравнениях вычисляются по выражению:
» в этих
уравнениях вычисляются по выражению:
 , (3.4.21)
, (3.4.21)
Далее задаемся
значением скольжения S, находим ![]() по кривой
по кривой ![]() и вычисляем
момент.
и вычисляем
момент.
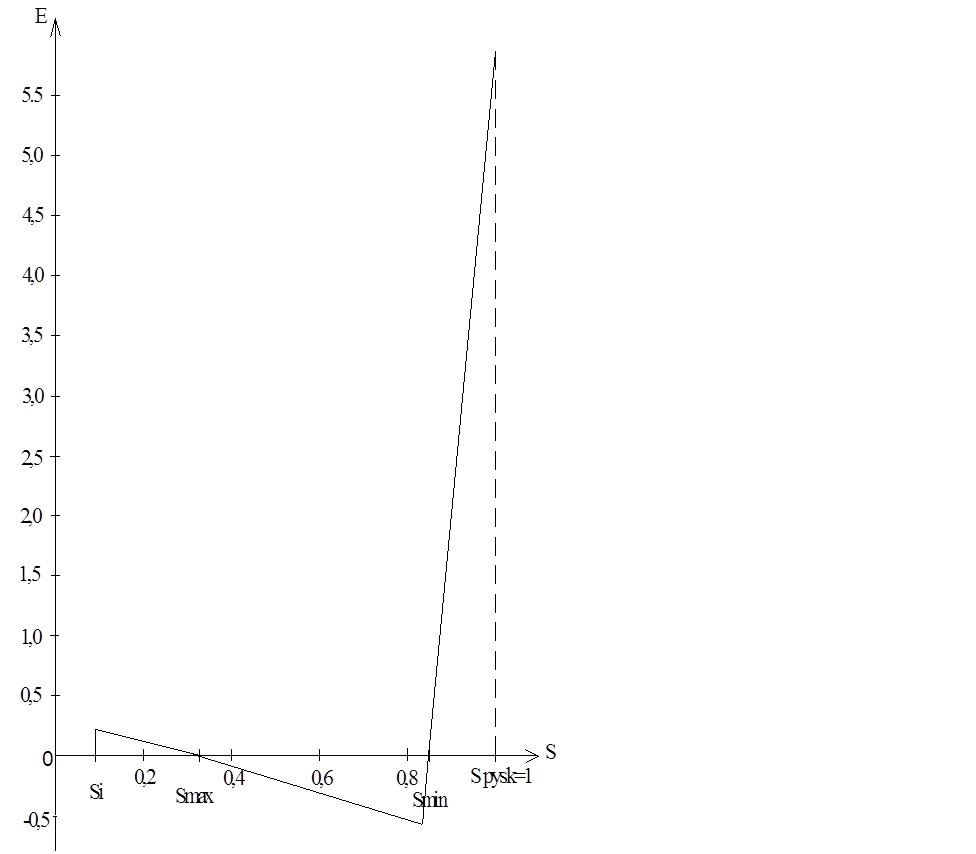
Рисунок 3.4.7 Зависимость Е=f(S)
Таблица 3.4.1 Результаты расчета механической характеристики электродвигателя
|
Расчетные величины |
Значения расчетной величины при скольжении |
|||||||||||
|
|
0,1 |
0,2 |
|
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,85 |
0,9 |
1,0 |
|
|
|
0,2 |
0,18 |
0,1 |
0,0 |
-0,1 |
-0,2 |
-0,3 |
-0,5 |
-0,6 |
0,3 |
2,0 |
5,8 |
|
|
1,2 |
1,2 |
1,1 |
1,0 |
0,9 |
0,8 |
0,7 |
0,6 |
0,5 |
1,3 |
3,0 |
6,8 |
|
|
0,4 |
0,4 |
0,2 |
0,0 |
-0,2 |
-0,4 |
-0,6 |
-0,9 |
-1,1 |
0,6 |
4,0 |
11,6 |
|
|
0,2 |
0,3 |
0,6 |
1,0 |
1,2 |
1,5 |
1,8 |
2,1 |
2,4 |
2,6 |
2,7 |
3,0 |
|
|
4,7 |
3,3 |
1,7 |
1,0 |
0,8 |
0,7 |
0,6 |
0,5 |
0,4 |
0,4 |
0,4 |
0,3 |
|
|
5,3 |
4,0 |
2,5 |
2,0 |
1,8 |
1,8 |
1,8 |
1,7 |
1,7 |
3,5 |
7,1 |
15,0 |
|
|
77,1 |
75,8 |
70,7 |
64,2 |
57,8 |
51,4 |
45,0 |
35,3 |
28,9 |
82,5 |
192,7 |
436,8 |
|
|
14,5 |
19,1 |
28,8 |
32,1 |
31,5 |
29,0 |
25,4 |
20,9 |
16,6 |
23,4 |
27,2 |
29,2 |
|
|
146,0 |
141,3 |
125,6 |
105,2 |
94,2 |
78,5 |
62,8 |
47,1 |
31,4 |
23,6 |
15,7 |
0,0 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.