Маркер(метка) — специальные изображения, визуальные идентификаторы для AR систем. В теории маркером может быть любая фигура(объект). Но на практике мы ограничены разрешением устройств захвата изображения, особенностями цветопередачи, освещения и вычислительной мощностью оборудования (т.к. все происходит в реальном времени, а потому должно делаться быстро), а потому выбирается обычно черно-белый маркер простой формы. Как правило это квадрат со вписанным во внутрь идентификатором-образом.
AR приложение — программное обеспечение, которое обрабатывает полученный сигнал и совмещает виртуальные модели с изображениями реальных объектов.
Трекинг (англ. tracking) — это технология, лежащая в основе взаимодействия человека с виртуальным миром. Она предназначена для определения позиции и ориентации реального объекта в виртуальной среде. Это три пространственные координаты (x, y, z) и три угла (α, β, λ), задающие его позицию и ориентацию в пространстве. Определение позиции и ориентации реального объекта в пространстве осуществляется при помощи маркеров.
Вопросы преразработки
После постановки технического задания для разработки конкретного проекта с использованием технологии AR возникает определенное количество параметров, правильная комбинация которых будет определяющим фактором максимально эффективной работы проекта.
Основой задачей является передача информации. Непосредственно информацией в данном случае будут объекты, которыми нужно дополнить визуальный ряд. Передающей стороной является пользователь, а принимающей стороной машина. Где инструментом пользователя для передачи является маркер, а средством приема соответственно будет являться устройство захвата изображения в реальном времени.
Маркер в данном случае будет являться контейнером информации, которая должна быть закодирована для наиболее эффективного распознавания принимающей стороной.
В простейшем случае это передача рисунка, то есть по сути булевого значения (совпадение/несовпадение). Для использования более широкого диапазона информации, понадобится ввести систему кодирования и декодирования.
Оптимальным решением здесь, как с точки зрения кодирования, так и визуального распознавания будет использование вместо рисунка двумерные матрицы. Под матрицей мы понимаем сегментированную квадратную область внутри маркера. Размерностью матрицы будет являться количество сегментов области. Каждый элемент матрицы (сегмент) может содержать информацию, которую можно зашифровать путем изменения яркости сегмента. Но учитывая, что речь идет о видеоряде и таких связанных с этим внешних факторах как освещенность помещения, расстояние до маркера и т.д., эффективнее всего будет взять максимально контрастные цвета, то есть либо черный, либо белый. Таким образом в качестве контейнера информации мы получим двумерную бинарную матрицу (рис 1).
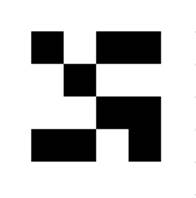
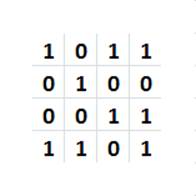
Рис.1 Черно-белая сегментированная область идентична бинарной матрице.
Прежде всего следует определиться с объемом информации для передачи. В простейшем случае следует взять матрицу минимального размера, но когда задача требует передавать большое количество информации встают вопросы о способах как это можно сделать. А таких способа два:
1) Изменение алфавита распознаваемых маркеров
2) Изменение количества сегментов маркера (размерности)
Изменение алфавита распознаваемых маркеров
Под алфавитом будем понимать конечное множество маркеров, каждый из которых имеет уникальную комбинацию бинарных сегментов. В свою очередь путем комбинации элементов алфавита получим возможность дополнительной кодировки. Общий объем передаваемой информации растет линейно относительно вместимости используемой размерности маркера.
Пусть M – объем каждого маркера, n – размер алфавита маркеров. Тогда общий объем информации будет считаться:
I = n∙M, где I – общий объем информации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.