Датчик тока размещён внутри преобразователя и его силовые концы выведены на силовой клемник преобразователя. Электроприводы выполнены по двухконтурной системе с подчинённым регулированием.
На изображённой схеме:
1 – регулятор скорости;
2 – адаптация регулятора скорости;
3 – корректирующее звено;
4 – токоограничение;
5 – динамическое токоограничение;
6 – регулятор тока;
7 – узел регулирования уравнительного тока;
8 – блок формирования управляющих импульсов;
9 – блок синхронизации;
10 – логический блок;
11 – блок питания;
12 – силовой трансформатор;
13 – силовой управляемый выпрямитель с уравнительными дросселями;
14 – двигательный агрегат, где М – высокомоментный электродвигатель постоянного тока; G – тахогенератор.
Sh – датчик тока;
CP – защита при обрыве фазы и неправильном присоединении вторичных обмоток силового трансформатора;
OL – защита при перегрузке электродвигателя во время работы;
OC – защита при превышении максимального тока или обрыве обратной связи по току;
OS – защита при превышении максимальной скорости;
TG – защита при отсутствии обратной связи по скорости.
Регулятор тока ПИ состоит из операционных усилителей с независимой настройкой пропорционального и интегрального коэффициентов. Предвидена возможность плавного изменения усиления и постоянной времени регулятора с целью облегчения настройки электропривода.
Для изменения коэффициента в зависимости от скорости используется широтно-импульсная модуляция.
В обратную связь включено корректирующее звено, состоящее из RC-группы.
Динамическое токоограничение является функцией частоты вращения двигателя. Схема действует по принципу ограничения напряжения на выходе регулятора скорости в соответствии с коммутационной кривой электродвигателя.
Регулятор тока – тоже ПИ. Выход регулятора подаётся на узел определения и регулирования уравнительного тока.
Фазовое управление тиристорного выпрямителя осуществлено по вертикальному принципу с линейным опорным напряжением. Оно состоит из трёх однотипных каналов.
Блок формирования управляющих импульсов одновременно распределяет импульсы на управление тиристорами. При подаче сигнала блока «Логика» этот же блок может запрещать работу путём блокирования импульсов.
Предназначение логического блока – обеспечивать правильную работу электропривода и предохранять его от возможных аварий. Нормальная работа обеспечивается путём блокирования регуляторов одновременно с блокированием управляющих импульсов.
Защиты реагируют на:
· неправильную последовательность фаз на входе преобразователя (СР);
· отсутствие фазы (СР);
· исчезновение линейного опорного напряжения (СР);
· отсутствие обратных связей по току (ОС) и скорости (TG);
· превышение максимального тока электродвигателя (ОС);
· превышение максимальных оборотов (OS);
· продолжительную работу с максимально допустимым током (OL).
Работа защит и нормальное состояние электропривода регистрируются световыми сигналами. При срабатывании какой-либо из защит, запуск электропривода после восстановления нормального состояния возможен только после повторной подачи сигнала, разрешающего работу.
Тиристорный блок представляет собой два управляемых выпрямителя, выполненных по шестипульсовой схеме со средней точкой.
Самым сложным этапом математического моделирования структурной схемы электропривода безусловно является формирование условий для пуска двигателя только при моменте, большем момента сопротивления двигателя.
Этот момент в схеме моделирования в MatLab приходится делать вручную.
Мною была введена дополнительная цепь, показанная на рисунке, которая имеет следующую логику.
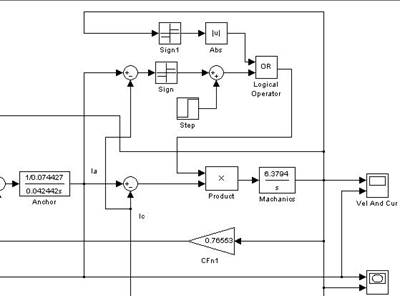
В цепь механической части двигателя на умножитель подаётся сигнал равный единице только тогда, когда скорость уже можно наращивать. Иначе там ноль, и двигатель не наращивает скорость.
Блок логики реализован по следующим двум алгоритмам:
·
запрет развития скорости, если ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.