Продифференцировав уравнение связи один раз по времени, получим связь ускорения груза и углового ускорения барабана лебедки
![]() , откуда
, откуда
 .
.
Подставим
значения  , а также заменив вес каждого тела на
произведение массы и ускорения свободного падения, запишем:
, а также заменив вес каждого тела на
произведение массы и ускорения свободного падения, запишем:
![]()
 .
.
В
полученных выражениях часть слагаемых (выделенные рамкой) имеют сомножитель ![]() , поэтому при равномерном прямолинейном движении
груза или его покое эти слагаемые будут равны нулю.
, поэтому при равномерном прямолинейном движении
груза или его покое эти слагаемые будут равны нулю.
Части равенств, имеющих сомножителем ускорение, представляют собой динамические соотношения составляющих реакций:
 ;
;
 .
.
Остальные слагаемые относятся к статическим составляющим реакций
 ;
;
 .
.
Подставляя числовые параметры, определим:
![]() ;
;
![]() ;
;
![]() ;
;
 .
.
Реакции жесткой заделки запишем в виде суммы статических и динамических составляющих:
![]() ;
;
![]() .
.
Анализ
полученных результатов. При ускорении груза ![]() ,
направленным вверх, реакции жесткой заделки увеличиваются за счет динамических
составляющих.
,
направленным вверх, реакции жесткой заделки увеличиваются за счет динамических
составляющих.
Глава 12. Принцип возможных перемещений
12.1. Принцип возможных перемещений
Возможными (или виртуальными) перемещениями точек механической системы называются воображаемые бесконечно малые перемещения, которые допускают наложенные на систему связи.
Принцип возможных перемещений, формулируется так: необходимым и достаточным условием равновесия системы сил, приложенных к механической системе, подчиненной стационарным двусторонним и идеальным связям, заключается в равенстве нулю суммы элементарных работ задаваемых сил на любом возможном перемещении системы из рассматриваемого ее положения.
![]() .
.
Принцип возможных мощностей: при равновесии механической системы под действием активных сил сумма возможных мощностей этих сил равна нулю.
Задача 3.21. Определить с помощью принципа возможных перемещений реакции опор составной конструкции (рис. 3.75).
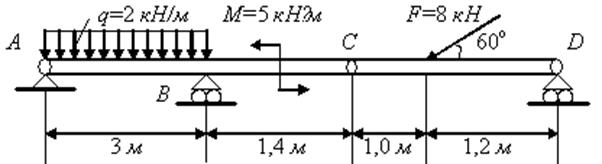
Рис. 3.75
Решение. Определение ![]() .Заданная составная балка под действием
плоской произвольной системы сил находится в равновесии, т.е. не имеет ни одной
степени свободы. Для определения
.Заданная составная балка под действием
плоской произвольной системы сил находится в равновесии, т.е. не имеет ни одной
степени свободы. Для определения ![]() зададим одну степень
свободы, соответствующую этой реакции, заменив шарнирно-неподвижную опору А
шарнирно-подвижной, приложив в точке А
зададим одну степень
свободы, соответствующую этой реакции, заменив шарнирно-неподвижную опору А
шарнирно-подвижной, приложив в точке А ![]() .
.
В результате составная балка получила возможность поступательного движения вдоль горизонтали. Покажем возможное перемещении балки таким образом, чтобы реакция ему препятствовала (рис. 3.76).
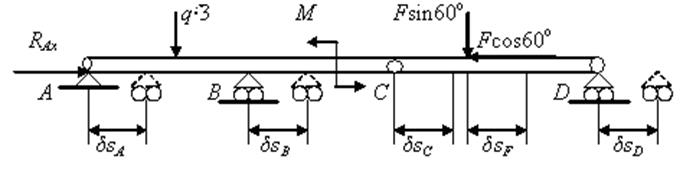
Рис. 3.76
Для равновесия механической системы с двухсторонними идеальными связями необходимо и достаточно, чтобы сумма элементарных работ задаваемых сил на любом ее возможном перемещении была равна нулю
![]() .
.
Уравнение возможных работ:
![]() .
.
Данное выражение содержит
неизвестную реакцию ![]() , которую условно причислили к
задаваемым силам, и неизвестные возможные перемещения точек приложения сил
, которую условно причислили к
задаваемым силам, и неизвестные возможные перемещения точек приложения сил ![]() и
и ![]() . Так
как вся система совершает поступательное движение, то возможные перемещения
точек приложения сил равны:
. Так
как вся система совершает поступательное движение, то возможные перемещения
точек приложения сил равны:
![]() ;
;
![]() .
.
Определение реакции
![]() .
.
Определение ![]() . Для
определения следующей реакции вернемся к исходной схеме и повторим ход решения
сначала. Дадим возможное перемещение балки в точке А вдоль направления
реакции
. Для
определения следующей реакции вернемся к исходной схеме и повторим ход решения
сначала. Дадим возможное перемещение балки в точке А вдоль направления
реакции ![]() , заменив шарнирно-неподвижную связь
шарнирно-подвижной и показав
, заменив шарнирно-неподвижную связь
шарнирно-подвижной и показав ![]() . Так как в точке В
балка перемещаться вертикально не может, то левая часть составной конструкции
повернется на некоторый угол
. Так как в точке В
балка перемещаться вертикально не может, то левая часть составной конструкции
повернется на некоторый угол ![]() вокруг точки В,
например, против хода часовой стрелки (рис. 3.77). Шарнир С вместе с левой
частью переместится на
вокруг точки В,
например, против хода часовой стрелки (рис. 3.77). Шарнир С вместе с левой
частью переместится на ![]() , заставив правую часть
конструкции балки
, заставив правую часть
конструкции балки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




