





УДК 625.7.001.2
ОСНОВЫ ПРИНЯТИЯ РЕШЕНИЙ ПРИ ПРОЕКТИРОВАНИИ
АВТОМОБИЛЬНЫХДОРОГ
BASES OF DECISION-MAKING AT DESIGNING HIGHWAYS
Ахраменко Галина Владимировна
Ahramenko Halina Vladimirovna
кандидат технических наук, доцент кафедры
«Изыскания и проектирование дорог»
Белорусский государственный университет транспорта, г. Гомель
Рассматривается один из способов принятия решений при проектировании автомобильной дороги и приводится пример выбора направления трассы с использованием множества Парето.
One of ways of decision-making is considered at designing highways and the example of a choice of a direction of a line with use of set Pareto is resulted.
Проблема принятия решений состоит в выборе человеком линии поведения в конкретной обстановке, т.е. в определении одного из возможных вариантов действия, который представляется ему предпочтительней. Ситуация, в которой необходимо принимать решения, типична и для процесса разработки проектов новых автомобильных дорог.
Главная задача, возникающая перед разработчиком проекта автомобильной дороги, состоит в том, чтобы принять обоснованные решения по структуре элементов системы и их параметрам [1]. Эта задача может быть сформулирована следующим образом: разработать проект автомобильной дороги с такой структурой элементов и их параметрами, чтобы обеспечить заданные размеры перевозок (параметры цели) при минимальных затратах. В условиях, когда затраты на строительство автомобильной дороги регламентированы, возможна постановка другой задачи проектирования: разработать проект автомобильной дороги с такой структурой элементов, чтобы обеспечить максимальные размеры перевозок при заданных затратах.
Решение поставленных задач проектирования автомобильной дороги может осуществляться на основе методов теории принятия решений [4]. По своей сути задачу принятия решений при выборе направления проектируемой автомобильной дороги можно отнести к многокритериальным статическим детерминированным задачам проектирования. Это объясняется следующими признаками:
- наличием нескольких критериев;
- наличием случайных факторов;
- независимостью критерия от времени.
При решении таких задач появляется несколько целей, обусловленных наличием критериев, которые желательно оптимизировать. Однако, как правило, эти цели противоречивы, что вносит в задачу неопределенность, преодолеть которую формальными методами нельзя. Например, естественно стремление разработчика проекта автомобильной дороги сделать ее такой, чтобы она была «получше», а затраты «поменьше». Однако найти решение, удовлетворяющее обоим устремлениям, невозможно. Выход из создавшегося положения находится в поиске компромисса, т.е. решения, не полностью, а в какой-то степени удовлетворяющего и один, и другой критерий. Для облегчения принятия решения в условиях многокритериальных задач можно использовать такие процедуры, как «линейная свертка», «выделение основного критерия» и «ранжирование вариантов». В данном случае рассматривается процедура «ранжирования вариантов», которая позволяет уменьшить число вариантов.
Рассмотрим задачу выбора направления автомобильной дороги. Пусть определены n допустимых вариантов уклонов трассирования i1, i2, . . .,in. Следовательно, для трассирования мы располагаем n значениями уклонов. Представим, что между начальными и конечными пунктами простирается водораздел с к седлами, определяющими возможные направления автомобильной дороги.
Теоретически число r возможных вариантов трассы равно r = к n и может быть большим. Например, при к = 5 и n = 4 число вариантов трассы r = 20. Принимая во внимание, что проектирование каждого варианта для получения результата – приведенных строительно-эксплуатационных затрат – требует много труда и времени, попытаемся уменьшить их число.
Запроектируем на карте n магистральных хода через все седла с уклонами i1,
i2, . . ., in; всего к n магистральных ходов. Для каждого магистрального хода определим коэффициент удлинения λ. В результате для каждого варианта трассы получим два показателя: уклон i и коэффициент удлинения λ.
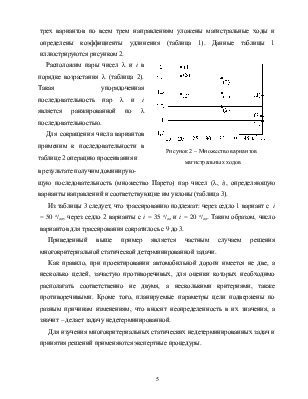
Для наглядности представим каждый вариант в виде точки в системе координат iО λ (рисунок 1). На плоскости множеству допустимых вариантов соответствует область Ω. Цифрами 1, 2, 3 и 4 обозначим крайние точки области Ω.
|
Рисунок 1 – Выделение конкурентных вариантов |
Точке 1 соответствует минимум, а точке 3 – максимум уклона, точке 2 – максимум, а точке 4 – минимум коэффициента удлинения. Анализ показывает, что варианты с меньшими уклонами лежат на левой границе области Ω (дуга 2 – 1 – 4), а варианты с меньшими коэффициентами удлинения лежат на нижней границе области Ω (дуга 1 – 4 – 3). Общим для дуг 2 – 1 – 4 и 1 – 4 – 3 является их отрезок |
1 – 4. Для вариантов, лежащих на дуге 1 – 4, справедлива следующая зависимость между i и λ: чем больше i, тем меньше λ. Для дуг 1 – 2 и 4 – 3 зависимость между i и λ имеет иной характер: чем больше i, тем больше λ. Понятно, что варианты с такой зависимостью между i и λ неприемлемы. На дуге 2 – 3 зависимость между i и λ такая же, как и на дуге 1 – 4, но варианты, принадлежащие дуге 2 – 3, имеют больший коэффициент удлинения, чем варианты, относящиеся к отрезку 1 – 4, например в сечении 1 – 1. Значит, только варианты, лежащие на дуге 1 – 4, должны разрабатываться и принимать участие в процедуре принятия решения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.