Схема 1 реализует управляющее воздействие на соединяемую деталь путем замыкания обратной связи по усилию. Базовая деталь должна фиксироваться на базовой установочной поверхности . адаптирующее устройство включает упругий подвес сопряженной установочной поверхности и перемещающий элемент в виде преобразователя поступательного движения рабочего органа. В соответствии с [3] эта схема относится к устройствам , обеспечивающим стабилизацию программного движения соединяемой детали.
Схема 2 обеспечивает управляющее воздействие как на соединяемую, так и на базовую детали. Базовая деталь должна иметь степени подвижности в плоскости, перпендикулярной ее оси симметрии. Адаптирующее устройство реализуется в виде упругого подвеса соединяемой детали и линейчатой поверхности с изменяемыми геометрическими параметрами, выполняющей функцию перемещающего элемента как для базовой, так и для соединяемой детали. Закон перемещения соединяемой детали определяется жесткостью упругого подвеса и законом изменения конфигурации линейчатой поверхности
. Закон перемещения базовой детали зависит от жесткости перемещающего элемента, трения между деталью и установочной поверхностью, инерционных параметров базовой детали. В соответствии с классификацией [3] такое устройство относится к средствам адаптации, реализующим терминальное управление базовой деталью, при котором деталь переводится из начального состояния в конечное за некоторое заданное время. Вид траектории перемещения в таких устройствах не контролируется.
Таблица 1
|
№ |
Конструктивная схема |
Реализация структурных компонент |
примечание |
|
1 |
1-базовая установочная поверхн. 2- сопряженная установочная поверхность 3-перемещающий элемент |
Устройство функционирует только при силовом замыкании кинематической цепи |
|
|
2 |
1- базовая установочная поверхность; 2- сопряженная установочная поверхность; 3-перемещающий элемент |
Перемещающий элемент выполнен в виде линейчатой поверхности: однополостный гиперболоид |
|
|
3 |
1- базовая установочная поверхность; 2- сопряженная установочная поверхность; 3- перемещающий элемент; |
Устройство функционирует при силовом замыкании кинематической цепи |
.
Схема 3 обеспечивает управляющее воздействие на соединяемую деталь. Адаптирующее устройство состоит из упругого подвеса с переменной угловой жесткостью и дополнительного двигателя, задающего вращение соединяемой детали вокруг оси симметрии. Управляющее воздействие возникает при некотором значении угловой жесткости упругого подвеса и в совокупности с вращением детали обеспечивает режим автоматического поиска базовой детали по траектории программного движения – в виде расходящейся спирали Архимеда. Параметры траектории программного движения и время поиска определяются конкретными условиями сборки и заранее не фиксируются. Это обстоятельство позволяет отнести подобные устройства к системам, реализующим алгоритм самонаведения детали (или автоматического поиска).
Рассмотрим конструктивные схемы адаптирующих устройств с точки зрения предлагаемых показателей.
Схема 1. Установочная поверхность базовой детали представляет собой жесткое базирующее устройство, жесткость которого соизмерима с радиальной жесткостью базовой детали. Приведенная жесткость перемещающего элемента
 (3)
(3)
где
![]() - радиальная жесткость перемещающего
элемента;
- радиальная жесткость перемещающего
элемента;
![]() - жесткость по координате Z ,
совпадающей с перемещением S;
- жесткость по координате Z ,
совпадающей с перемещением S;
![]() - угол между направляющей поверхностью и
вертикалью;
- угол между направляющей поверхностью и
вертикалью;
f – коэффициент трения между соединяемой деталью и направляющей поверхностью.
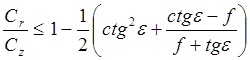
Первый показатель с учетом зависимости (3) принимает вид:
 (4)
(4)
Считая
жесткости ![]() величинами одного порядка, получим условие,
при котором
величинами одного порядка, получим условие,
при котором ![]() :
:
 (5)
(5)
Для
![]()
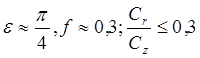 .
.
В
реальных устройствах отношение ![]() , как правило, не
превышает 0,1. Следовательно, конструктивная схема 1 обеспечивает
ограничивающий характер связей установочной поверхности.
, как правило, не
превышает 0,1. Следовательно, конструктивная схема 1 обеспечивает
ограничивающий характер связей установочной поверхности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.