3.1.2 Расчет динамических параметров объекта управления.
Для аналитического определения динамических параметров объекта управления надо выполнить линеаризацию дифференциальных уравнений (1),(2). С этой целью надо заменить в них нелинейные зависимости линейными в ограниченном диапазоне изменения переменных Dv, Duкс, Duв, Diв, D( СvФ) относительно постоянных величин v, Uкс, Uв, Iв, СvФ:
 ,
(4)
,
(4)
|
(5)
![]()
Коэффициент Кф в уравнении (5) является коэффициентом наклона линейного отрезка характеристики намагничивания СvФ (Iв) тягового электродвигателя в расчетном диапазоне изменения тока возбуждения DIв (рис. 4б), Ом/(км/ч):
|
. (6)
Коэффициент Кф надо определить для токов возбуждения Iв1 и Iв2, обеспечивающих поддержание заданного тока якорей Iя0 при скорости движения v1, v2 ( см. раздел 4, рис.10, рис.11 ).
В пояснительной записке привести расчёт коэффициентов по формуле (5)
Для определения передаточных функций звеньев направленного действия, отображающих динамические характеристики объекта регулирования надо выразить уравнения (4),(5) в операторной форме и преобразовать относительно выходных переменных:
|
|
(8)
В уравнениях (7),(8) приняты следующие обозначения коэффициентов преобразования и постоянных времени.
 (9)
(9)
 (10)
(10)
 (11)
(11)
 ; (12)
; (12)
 (13)
(13)
Величину проводимости контура вихревых токов gвх магнитопровода тягового электродвигателя для расчета постоянной времени Твх в формуле (12) надо вычислить по геометрическим размерам остова: -толщине s0 ,-высоте h0, длине полюсной дуги lm и размерам полюсного сердечника: -ширине bП ,- высоте hП ,-длине lП[3], 1/Ом:
 (14)
(14)
Здесь g0=7,15.106
 – удельная проводимость стали
остова .
– удельная проводимость стали
остова .
Суммарную индуктивность ∑Lя цепи якорей в формуле (13) составляют индуктивность Lя обмоток якорей ТЭД , индуктивность шунтов Lш, приведённая индуктивность контактной сети Lкс .
Индуктивность шунта принять равной Lш=0,045 Гн.
Величину индуктивности обмотки якоря ТЭД надо вычислить по формуле Уманскло, Гн:
 (15)
(15)
В пояснительной записке надо привести расчёты коэффициентов и постоянных времени по формулам (9)…(15) .
Из уравнений (7),(8) следует, что цепь якорей и контуры вихревых токов магнитопроводов тяговых электродвигателей представляют собой апериодические звенья 1-го порядка с постоянными времени соответственно Tя и Tвх. Коэффициенты Kя , Kv ,Kс , Kф в уравнениях (7),(8) характеризуют преобразование регулирующего воздействия DIв, возмущающих воздействий Dv, DUкс в изменение выходной переменной – тока якоря DIя в статических режимах:
 . (16)
. (16)
Коэффициент усиления объекта управления Kоу, Kc в формуле (16)
 , (17)
, (17)
представляет собой коэффициент наклона линеаризующего отрезка характеристики Iя(Iв) для токов возбуждения Iв1,Iв2, обеспечивающих поддержание заданного тока рекуперации при скорости движения v1, v2 (см. рис.4а). Коэффициент Коy характеризует регулировочные свойства объекта управления.
В пояснительной записке надо привести расчёт коэффициентов по формуле (17).
Коэффициенты Кv и Кс определяют нагрузочные свойства объекта управления, обусловленные изменением возмущающих воздействий.
3.2 Расчет статистических характеристик и динамических параметров исполнительного устройства.
Статические характеристики и динамические параметры исполнительного устройства - генератора возбуждения НБ436В определяются дифференциальными уравнениями равновесия напряжений цепи возбуждения тяговых электродвигателей, генератора возбуждения и уравнением намагничивающих сил генератора возбуждения :
|
(18)
|
(19)
|
. (20)
В уравнениях (18),(19),(20) приняты следующие обозначения:
årв= 2(rв+ rяв) - суммарное сопротивление цепи возбуждения тяговых электродвигателей;
årн= rр+ rн - суммарное сопротивление цепи возбуждения генератора.
gвхв - проводимость контура вихревых токов генератора возбуждения (вычисляется по формуле (14).
3.2.1 Расчет статической характеристики исполнительного устройства.
Статическая характеристика исполнительного устройства - генератора возбуждения - это зависимость тока возбуждения тяговых электродвигателей от тока возбуждения генератора Iв(Iн).
Для расчета этой характеристики надо произвести вычисления магнитного потока генератора возбуждения при заданных значениях тока возбуждения Iв тяговых электродвигателей, В/(об/мин):
|
(21)
Для каждого вычисленного значения магнитного потока надо определить по характеристике намагничивания СnФв(Iн) соответствующую величину тока Iн.
В пояснительной записке надо привести пример расчёта по формуле (21).
Результаты расчета статической характеристики Iв(Iн) надо представить в виде табл.5. Графическая зависимость характеристики показана на рис.5а.
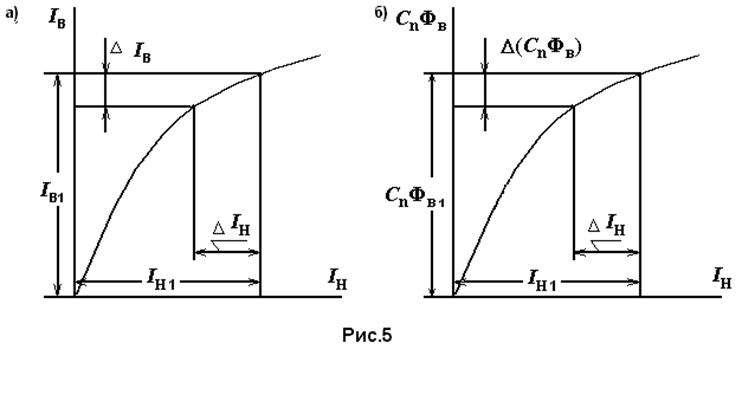
Таблица 5
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.