ограничено, т.к. при приемлимых в большинстве случаев погрешностях аппроксимации (0,1 - 1 %) требует большого объема ЗУ.
Характеристику любого датчика можно отразить некоторой математической функцией, выражающей зависимость между входным воздействием и выходным напряжением. Линеаризация при этом может осуществляться после измерения напряжения датчика путем вычисления функции обратной указанной выше. Такую функцию в измерительных системах называют функцией преобразования. Однако выражение описывающее функцию преобразования может быть достаточно сложным и программное ее вычисление с помощью числовых методов приведет либо к большим вычислительным ошибкам либо к большому времени выполнения вычислений и, как следствие, к невозможности работы системы в реальном масштабе времени.
Для упрощения вычислений функция преобразования аппроксимируется. Аппроксимация проводится с помощью полиномиальных или дробно-рациональных функций. Как показывает практика использование аппроксимирующих функций второго и большего порядков не оправдывается» Погрешность аппроксимации для "гладких" функций преобразования характеристик термодатчиков при порядке аппроксимирующих функций равном два менее 0,01 %. Время же их программного вычисления достаточно велико. Поэтому на практике чаще всего используют аппроксимацию с помощью функций первого порядка - кусочно-линейную аппроксимацию.
При кусочно-линейной аппроксимации функция преобразования представляется в виде отрезков ломаной. Совокупность ее отрезков рис.2 описываются следующим образом:
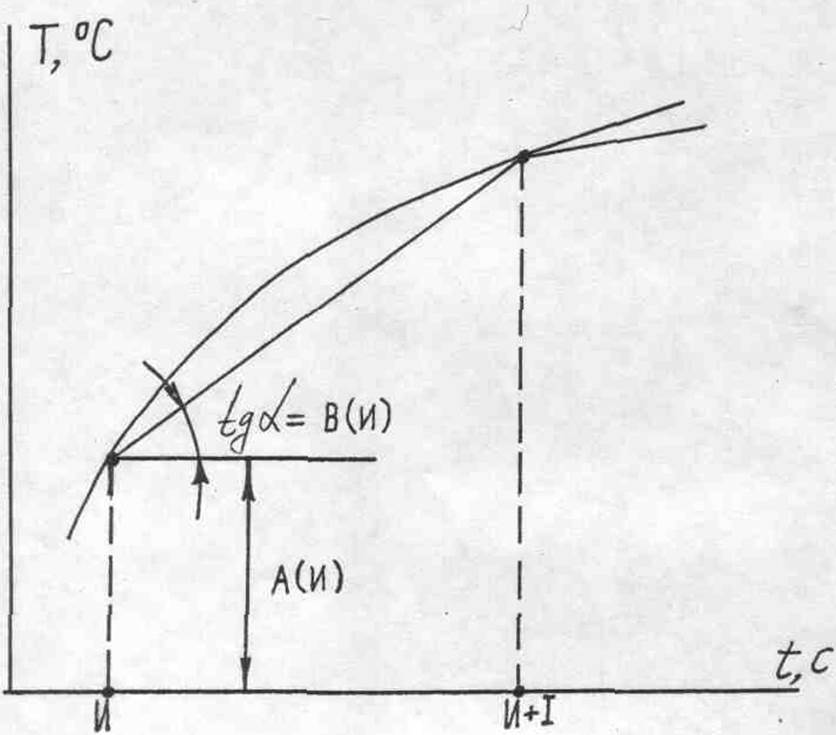
Рис.2 Кусочно-линейная аппроксимация передаточной характеристики термодатчика
Т(Х)= А (И) + В(И)*(Х - Х(И))
где: Т - линеаризованное значение температуры;
И - номер участка аппроксимации;
Х - текущее значение напряжения с датчика;
Х(И) - ордината узла аппроксимации;
А(И) - абсцисса узла аппроксимации;
В(И) - коэффициент наклона участка аппроксимации.
Значение коэффициентов А(И) и В(И) заранее рассчитываются и хранятся в цифровой памяти измерительной системы. Если проводить равномерное разбиение диапазона изменения аргумента функции преобразования, а число участков выбрать равное 2**Н, то код Н старших разрядов АЦП, с помощью которого мы преобразуем напряжение датчика в двоичный код, будет определять номер участка аппроксимации которому в данный момент времени соответствует это напряжение. При этом оставшиеся младшие разряды будут показывать приращение аргумента функции на данном участке аппроксимации.
Именно этот подход к линеаризации характеристики применяется в разработанном устройстве. Коды коэффициентов аппроксимации для характеристики датчика типа ТХА заранее рассчитаны и хранятся в таблице, размещенной в адресном пространстве программной памяти. Диапазон изменения напряжения датчика разбит на 16 участков аппроксимации. Как показали соответствующие расчеты относительная погрешность аппроксимации при этом не превышает 0,01 %.
2.2 Коррекция погрешности смещения в аналоговых цепях терморегулятора
Терморегулятор находится в непосредственной близости от объекта нагревах, поэтому необходимо сразу учитывать, что он может работать в условиях повышенной температуры окружающей среды. При этом необходимо принимать меры не только обеспечивающие его работоспособность как таковую при повышенной температуре, но и меры позволяющие при изменении температуры окружающей среды обеспечивать заданную точность работы устройства. Кроме методов термостабилизации параметров элементов схемы широкое применение получили методы периодического контроля состояния устройства и коррекции результатов измерений по результатам контроля.
В данном устройстве основная обработка результатов измерений производится в цифровой форме. Повышение температуры окружающей среды не привадит к увеличению погрешностей преобразования сигналов, представленных в цифровой форме если все цифровые элементы схемы остаются работоспособными. В данном устройстве чувствительными к изменениям температуры будут аналоговые элементы, входящие в состав входного усилителя и АЦП. Изменение температуры будет приводить к появлению погрешностей смещения нуля, масштаба, дифференциальных погрешностей передаточной характеристики АЦП. Все указанные погрешности могут идентифицироваться и корректироваться.
Для идентификации погрешности смещения нуля достаточно произвести измерение входного сигнала при закорачивании вход первого усилительного каскада на шину аналоговой земли.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.