гідродвигуна р
= р1-p2, тобто
перепад тиску у міждросельних камерах 2 і 3, який використовується для привода золотника
1 другого каскаду підсилення або
будь-якого іншого гідродвигуна. Зміна тисків досягається за ![]()
![]() рахунок переміщення заслінки міжсоплами. При переміщенні заслінки, наприклад праворуч, тиск р2 збільшується, а p1 —
зменшується. Утворений перепад тиску р = р2-p1перемістить
золотник 1 ліворуч, долаючb
навантаження (зусилля пружин золотника). Отже, кожному
положенню заслінки відповідає певне положення золотника, тобто перепад тиску
пропорційний одночасно і переміщенню заслінки і переміщенню золотника. Це дозволяє переміщувати золотник на величину, пропорційну сигналові управління,
що поступає па заслінку. Гідропідсилювачі з позиційним навантаженням (пружини
золотника) є статичними. Для одержання астатичного гідропідсилювача в розглядуваній схемі достатньо зняти
пружини золотника, тобто вилучити зворотний зв'язок.
рахунок переміщення заслінки міжсоплами. При переміщенні заслінки, наприклад праворуч, тиск р2 збільшується, а p1 —
зменшується. Утворений перепад тиску р = р2-p1перемістить
золотник 1 ліворуч, долаючb
навантаження (зусилля пружин золотника). Отже, кожному
положенню заслінки відповідає певне положення золотника, тобто перепад тиску
пропорційний одночасно і переміщенню заслінки і переміщенню золотника. Це дозволяє переміщувати золотник на величину, пропорційну сигналові управління,
що поступає па заслінку. Гідропідсилювачі з позиційним навантаженням (пружини
золотника) є статичними. Для одержання астатичного гідропідсилювача в розглядуваній схемі достатньо зняти
пружини золотника, тобто вилучити зворотний зв'язок.
|
Рис. 3.65. Схема підсилювача з розподільниками сопло-заслінка |
Як правило, заслінка закріплюється на рухливому важелі 4 досить великої довжини. Це дозволяє вважати її переміщення (поворот) відносно сопел практично прямолінійним, а зазор між соплом і заслінкою - паралельним. При цьому тертя ковзання змінюється тертям кочення при повороті заслінки.
Усе це призводить до того, що для керування (переміщення) заслінкою потрібні досить малі зусилля, які можуть створюватись задаючими пристроями малої потужності: манометрами, відцентровими регуляторами, термометрами, датчиками тиску, малопотужними електромагнітами і т. п.
Недоліком цього гідропідсилювача є значна витрата рідини через сопла (втрата) і порівняно низький ККД ( < 12,5 %). Саме тому цей гідропідсилювач застосовується для гідроприводів незначної потужності.
У зв'язку з цим гідропідсилювачі типу сопло-заслінка набули найбільшого поширення у двокаскадних системах управління як підсилювачі першого каскаду (рис. 3.65), де в ролі другого каскаду підсилення використано золотниковий гідропідсилювач. Таке сполучення підсилювачів дозволяє використовувати переваги підсилювача типу сопло-заслінка (високу чутливість, точність і швидкодію) з перевагами золотникового гідропідсилювача з порівняно високим ККД і великою потужністю, що він розвиває.
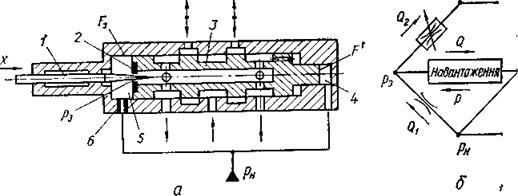
У машинобудуванні застосовуються прості за конструкцією гідропідсилювачі з голчастим дроселем (рис. 3.66, а). Розрахункова схема такого підсилювача може бути зображена несиметричним гідравлічним містком з одним регульованим опором (рис. 3.66, б). Регульований опір виконано у вигляді голчатого дроселя (у вигляді голки / і діафрагми 2), нерегульований — у вигляді постійного дроселя 6. Рідина під тиском рн надходить з одного боку в плунжерну камеру, а з другого — через постійний дросель 6 у торцеву камеру 5 золотника З, потім через регульований дросель на злив. Тиск у камері 5 залежить від положення голки відносно діафрагми.
Таким чином, золотник З знаходиться
під дією двох сил: з одного боку, тиску рн на площу F' плунжера, з іншого — тиску р3
на площу F3золотника.
При відсутності навантаження у нейтральному положенні ці сили будуть рівними, а
золотник — нерухомим ![]()
Керування здійснюється за допомогою голки 1. Переміщенням голки відносно діафрагми змінюють величину поперечного перерізу вікна між голкою 1 і діафрагмою 2, що веде до зміни тиску р3. Це порушує рівновагу і веде до переміщення золотника. При переміщенні голки 1 праворуч тиск р3 зростає і золотник теж переміщується праворуч на величину переміщення голки, тобто до відновлення рівноваги сил. При переміщенні голки ліворуч тиск р3 зменшується і під дією тиску рн в плунжерній камері 4 золотник 3 переміщується ліворуч доти, доки знову не відновиться рівновага сил на торцях золотника. Отже, золотник постійно слідкує за положенням голки, а цей гідропідсилювач є підсилювачем із зворотним зв'язком.
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.