Момент при 2400 : ![]() Н*м
Н*м
При проверке:
 ) или для
нашей механической системы:
) или для
нашей механической системы:
![]()
 =
=  Н*м
Н*м
При сравнении было получено:
![]() 76 Н*м
76 Н*м ![]() 75 Н*м
75 Н*м
Определим погрешность:
 =
=  = 1,31
%
= 1,31
%
5.Расчёт инерционности механической системы.
Критерием приведения является кинетическая энергия.
Определим момент инерции каждого звена:
J = m * (0.3 * l)2 , где l – длина звена.
Jоа = (0,3*0,04)2*0,3 = 0,000324 кг2*м.
Jав = (0,3*0,23) 2*0,6 = 0,0028566 кг2*м.
Jвс = (0,3*0,14) 2*0,5 = 0,000882 кг2*м.
Jde = (0,3*0,3) 2*0,2 = 0,00162 кг2*м.
После задания инерционности был получен график:
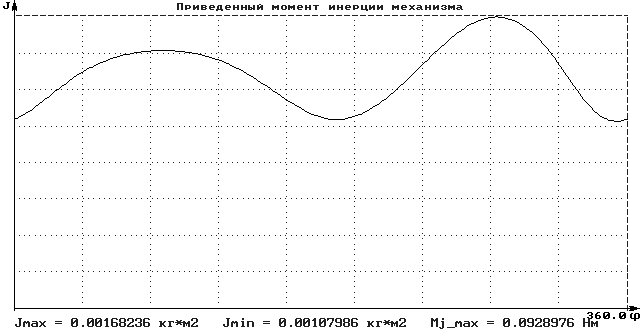
Рис. 7
Максимальный момент инерции: Jmax = 0.00168236 кг2*м
Был выписан момент инерции для 2400.
![]() = 0,0014081 кг2*м
= 0,0014081 кг2*м
Аналитическое определение момента инерции:
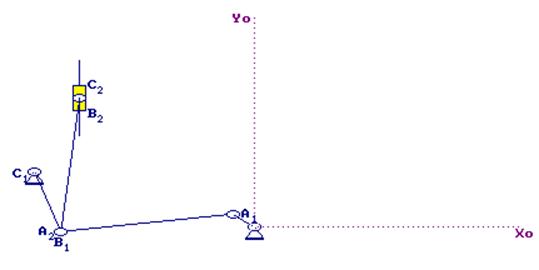
Рис. 8
Формула для аналитического определения:
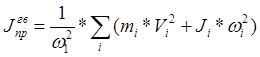
Выпишем скорости:
V1 = 0.594764
V2 = 0.520419
V3 = 0.327120
V4 = 0.199120
Был получен
момент инерции: ![]() = 0,00145
= 0,00145
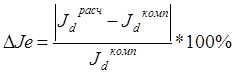 = 2.975%
= 2.975%
6. Расчёт привода механической системы.
Выбираем электродвигатель: Наша мощность Р = 0,709 кВт.
Максимальный момент: : Мmax = 141,325 Н*м.
Из каталога был выбран ЭД А041-6/4:
Р = 0,8 кВт.
nдв = 1440 об/мин
nкр = 142 об/мин
Рассчитаем
передаточное отношение:  = 10,14
= 10,14
Номинальная частота вращения: ωн = 150.736 1/c
Синхронная частота вращения: ωс = 157.08 1/c
 , где
, где
 = 1 - 0,96 = 0,04 (4%)
- скольжение.
= 1 - 0,96 = 0,04 (4%)
- скольжение.
Номинальная мощность:
Pн = Тн*ωн , где Рн – (мощность нашего ЭД ) = 0,8 кВт.
ωн - (номинальная частота вращения) = 150,796 1/с
Тн = Pн/ ωн = 5,305 Н*м.
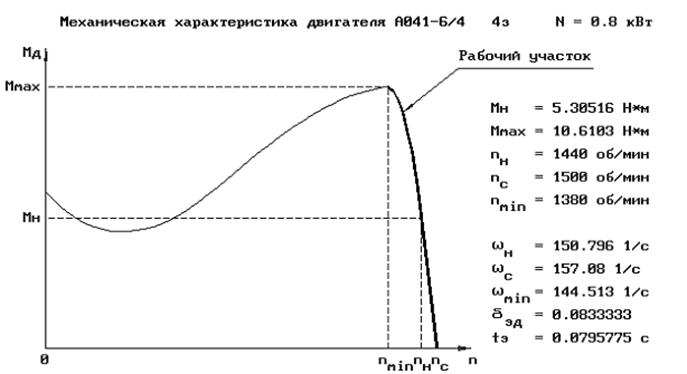
Рис. 9
7. Расчет редуктора и его геометрических размеров.
После определения типа двигателя мы должны выбрать редуктор.
Редуктор – это устройство, предназначенное для уменьшения числа оборотов.
В соответствии с численным
значением передаточного числа ![]() 7,2 был выбран двух
ступенчатый цилиндрический редуктор.
7,2 был выбран двух
ступенчатый цилиндрический редуктор.
Далее зайдя на позицию «Данные» мы ввели данные необходимые для расчёта редуктора. Необходимыми данными является:
1. Число оборотов двигателя n = 1440 об/мин.
2. Передаточное
отношение: ![]() 10,14.
10,14.
3. Максимальный момент: Мmax = 95.6229 Н*м.
После чего был получен результат, т.е расчет нашего редуктора и его геометрические размеры.
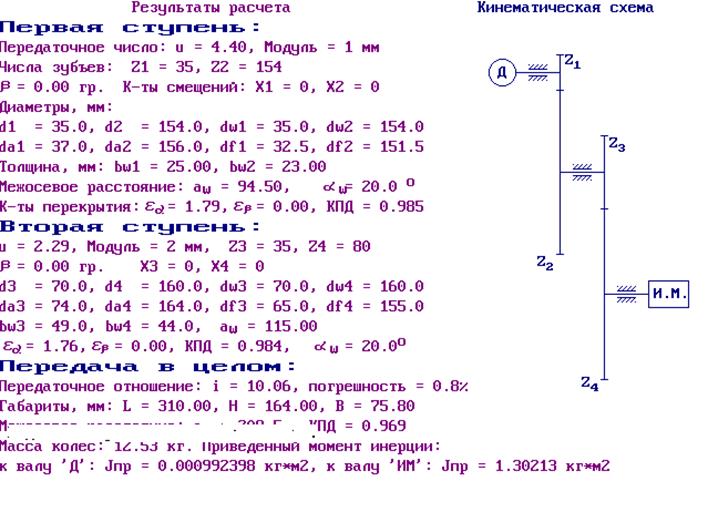
Для проверки данных выполним расчет одной ступени, для этого не обходимо:
Модуль: m = 1 мм.
Число зубьев: Z1 = 35 Z2 = 154
Решение
Отношение ![]() называется модулем зацепления и
обозначается m, где p – шаг.
называется модулем зацепления и
обозначается m, где p – шаг.
а) Найдем диаметры делительных окружностей:
dW1 = m*Z1 = 1*35 = 35 мм.
dW2 = m*Z2 = 1*154 = 154 мм.
б) Найдем окружности впадин:
df1 = m*(Z1 - 2.5) = 32.5 мм
df2 = m*(Z2 - 2.5) = 151,5 мм в) Найдем окружности выступа:
da1 = m*(Z1 + 2) = 1*(35 + 2) = 37 мм
da2 = m*(Z2 + 2) = 1*(154 + 2) = 156 мм г) Найдем межосевое расстояние:
a1,2
= = 0.5*m*(Z1+Z2) = 94.5 мм.
= 0.5*m*(Z1+Z2) = 94.5 мм.
При расчёте были получены те же результаты, что подтверждает правильность проверочного расчета.
8. Динамика. Истинный график изменения угловой скорости.
Ранее было сказано, что частота вращения принята постоянной.
Наша главная задача:
Определение «Истинного закона движения главного вала. Оценка неравномерности его движения и причины, обусловивших эту неравномерность»
Следует отметить, что колебание угловой скорости оценивается коэффициентом неравномерности.
 , где
, где 
Высокая
плавность движения обусловлена низким значением ![]() .
.
Для повышения плавности движения на главный вал устанавливается дополнительная инерционная масса, которая служит аккумулятором энергии. Дополнительная инерционная масса – маховик.
Маховик «на всплеске» аккумулирует в себя энергию движения, для того, чтобы отдать её на провале.
Получаем графики:
Угловая скорость главного вала.
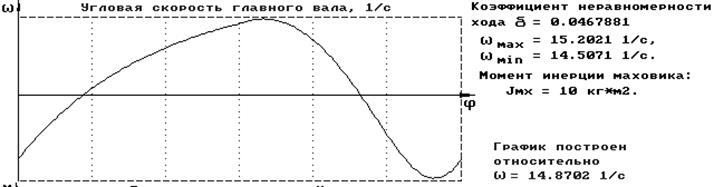
Рис.10
Угловое ускорения главного вала.

Рис.11
Графики приведенных моментов.
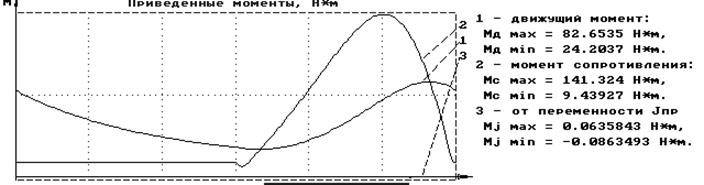
Рис.12
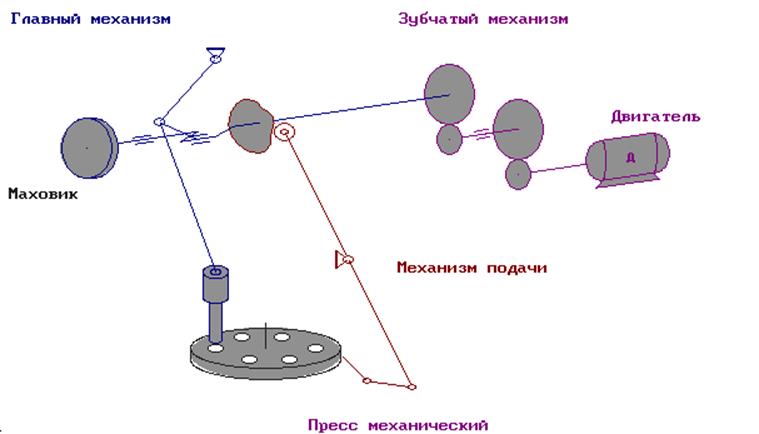
9. Механическая система в окончательном виде.
Заключение.
В ходе проделанной работы был построен механизм, рассчитаны его инерционные и кинематические характеристики. Также были рассчитаны моменты сил с учётом вредного сопротивления и без него. Потом подобрали соответствующий двигатель и передаточный механизм, рассчитав их характеристики. Некоторые значения подтверждали расчётами с помощью аналитических и графических методов. Погрешность моих расчётов в сравнении с компьютерными не превышала 3 % . Она обуславливается неточностью графических построений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.