ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ
Кафедра «Теория механизмов и робототехнические системы»
Пояснительная записка.
«Анализ работы механической системы»
Вариант № 2.6
Выполнил: студент
Пантин А. П.
группа АС – 407
Руководитель: Филяков А.Е.
Санкт-Петербург
2005
Содержание.
1. Методика решения задания в паке «Лавров»…………………………….…3
2. Обобщенная структурная схема машины…………………………………...6
2.1. Преобразующие механизмы…………………………………………….6
2.2. Проверка работоспособности механизма………………………………7
3. Кинематика преобразовательного механизма…………………………..…..7
3.1. Закон движения кривошипа……………………………………………..7
3.2. Расчет скорости и ускорения графическим методом………………….8
4. Внешняя нагрузка……………………………………………………….……8
5. Расчёт инерционности механической системы………………………….…11
6. Расчёт привода механической системы……………………………….……12
7. Расчетредуктора и его геометрических размеров…………………………13
8. Динамика. Истинный график изменения угловой скорости.………….. ...15
Заключение…………………………………………………………….…16
1). Вход в систему осуществляется набором в окне пользователя группового кода (например, АТ 104-6, где 6- номер дисплейного класса).
2). Через раздел «ПРОГРАММЫ» и наименование «КАФЕДРА РТС» инициировать работу пакета «ЛАВРОВ».
3). В окне «МОДУЛЬ ПЕЧАТИ» присвоить индивидуальное ИМЯ (латинскими символами) задания, с которым Вам предстоит работать (имя необходимо запомнить).
4). Пакет запускается на исполнение с использованием клавиатуры и команды "Enter".
5). В разделе «ГЛАВНЫЙ МЕХАНИЗМ» выполнить построение рычажно-ползунного механизма по заданным размерам и проверить его работоспособность (записать в файл «Главного механизма» F1).
6). В разделе «ДВИЖЕНИЕ КРИВОШИПА» задать закон его движения (на начальном этапе расчета угловая скорость вращения кривошипа принимается постоянной), а также численное значение угловой скорости (ω = nkp / 9,55), (убедиться в том, что интервал угла поворота кривошипа составляет 0 ... 360 °- по умолчанию).
7). В разделе «КРАЙНИЕ ПОЛОЖЕНИЯ», оперируя позициями и «КРИТЕРИЙ» и «ПОИСК», установить «Дальнее» и «Ближнее» положение ползуна, ВЫПИСАВ отдельно соответствующие углы поворота кривошипа (эти углы отсчитываются от оси Хо: φкрдал, φкрбл). При этом угол поворота кривошипа соответствующий «ДАЛЬНЕМУ ПОЛОЖЕНИЮ» - УСТАНОВИТЬ КАК НАЧАЛЬНЫЙ - φкрнач (необходимо убедиться в разделе «ДВИЖЕНИЕ КРИВОШИПА», что НОВЫЙ интервал угла поворота кривошипа СКОРРЕКТИРОВАЛСЯ и составляет: φкрнач …. φкрнач + 360°)
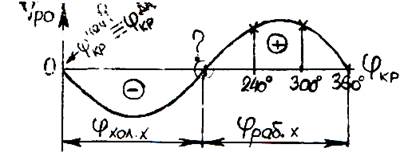
Произвести расчет угла поворота кривошипа, соответствующий перемещению ползуна из «ДАЛЬНЕГО ПОЛОЖЕНИЯ» к «БЛИЖНЕМУ»: нанести численные значения углов на нижеследующий график: φкрнач→бл = | φкрбл - φкрдал| = φкрхх
Установить интервал поворота кривошипа соответствующий «РАБОЧЕМУ ХОДУ» (φкррх), при котором ползун выполняет работу, преодолевая силу полезного сопротивления (этот интервал уточняется с учетом ПОЛОЖИТЕЛЬНОЙ области графика скорости движения ползуна, которая определяется в разделе - «Кинематический анализ»). Движение ползуна в обратную сторону носит название «ХОЛОСТОЙ ХОД»;
8). В разделе «КИНЕМАТИЧЕСКЕИЙ АНАЛИЗ»(F2) для 6 положений механизма определить скорости и ускорения исполнительного органа.
ПРОВЕРОЧНЫЙ РАСЧЕТ: для положений механизма, определяемых φкр = 240° или 300°, ВЫПИСАТЬ результаты компьютерного расчета и сравнить с построенным на формате АЗ графоаналитическим расчетом методом планов, определив расхождение результатов за счет неточности графических построений (допустимо отклонение 5% …..7%).
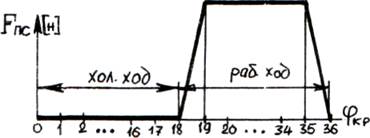
9). В разделе «ВНЕШНЯЯ НАГРУЗКА» задать табличным способом (36 строк) нагрузку- силу полезного сопротивления перемещению ползуна в функции угла поворота кривошипа на интервале РАБОЧЕГО ХОДА в следующем виде
|
|
Fпс = f (φкр) График задания внешней нагрузки Fпс |
С использованием позиции «ПРИВЕДЕНИЕ» пересчитать внешнюю нагрузку в момент сил полезного сопротивления, приведенный к главному валу (кривошипу) (Мпс). Выполнить проверочный расчет.
Вредное сопротивление, обусловленное силами трения, учесть дополнительно при повторном расчете момента сил нагрузки, приняв значение приведенного момента сил вредного сопротивления 10% от Мпсmax) по результатам первого расчета. Значения максимального приведенного момента (Мсmax) и потребной мощности (Р=Мω) ВЫПИСАТЬ отдельно, чтобы использовать в дальнейшем при выборе электродвигателя и задании данных в разделе «ПРИВОД». ( Если в результате расчета потребная мощность оказалась меньше 0,5 кВт – скорректировать Fпс в большую сторону). Результаты расчета записать в файл F3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.