








Миристерство образования и науки Украины
Донбасский государственный технический университет
Кафедра АУТПТЭК
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К выполнению лабораторной работы
«Исследование датчиков для
автоматизации
шахтного конвейерного транспорта»
по курсу «Технические средства автоматизации»
для студентов специальности 6.09250113
Алчевск 2006
ОГЛАВЛЕНИЕ
1 Краткие сведения о датчиках
1.1 Датчик контроля скорости УПДС (ДКС)
1.2 Магнитоиндукционный датчик ДМ-2
1.3 Датчик бесконтактного контроля вращения БКВ
1.4 Датчик контроля схода ленты КСЛ-2
1.5 Кабель-троссовый выключатель КТВ-2
1.6 Датчик контроля заштыбовки ДЗШ-2
2 Средства для выполнения работы
3 Порядок выполнения работы
4 Содержание отчета
5 Контрольные вопросы
Исследование датчиков для автоматизации шахтного конвейерного транспорта
Цель работы - изучение конструкции и принципа действия датчиков УПДС, ДМ-2, БКВ, НСЛ-2, КТВ-2 и ДЗШ-2 для автоматизации шахтного конвейерного транспорта.
1 Краткие сведения о датчиках
1.1 Датчик контроля скорости УПДС (ДКС)
Датчик УПДС (ДКС) предназначен для получения электрического сигнала, используемого для контроля движения и скорости ленты ленточного конвейера при совместной работе с аппаратурой автоматизации типа АУК. 1М, УКЛ или устройствами контроля скорости типов УКС и УКПС /9,10/. Датчик может эксплуатироваться в шахтах, опасных по газу и пыли, а также на поверхности шахт в помещениях обогатительных фабрик.
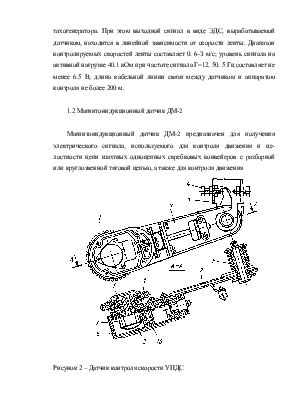
Конструктивная схема датчика УПДС-2 приведена на рисунке 2. Датчик представляет собой 10-ти полюсный тахогенератор 9 однофазного переменного тока, заключенный в пластмассовый корпус 8. Ротор 7 тахогенератора, являющийся постоянным магнитом, через муфту б соединен с приводным роликом 1. Корпус генератора соединен с рычагом 2 и шарнирно связан со скобой 3, которая крепится болтами к раме конвейера. Ролик датчика прижимается к ленте с помощью пружины 5. Регулировочным болтом 4 можно изменять величину контролируемого провисания ленты. Искробезопастность датчика обеспечивается неотключаемым селеновым шунтом 10, находящимся в его корпусе. Поступательное движение ленты конвейера преобразуется во вращение ролика вместе с роторном тахогенератора. При этом выходной сигнал в виде ЭДС, вырабатываемой датчиком, находится в линейной зависимости от скорости ленты. Диапазон контролируемых скоростей ленты составляет 0. 6-З м/с; уровень сигнала на активной нагрузке 40.1 кОм при частоте сигнала Г=12. 50. 5 Гц составляет не менее 6.5 В; длина кабельной линии связи между датчиком и аппаратом контроля не более 200 м.
1.2 Магнитоиндукционный датчик ДМ-2
Магнитоиндукционный датчик ДМ-2 предназначен для получения электрического сигнала, используемого для контроля движения и целостности цепи шахтных одноцепных скребковых конвейеров с разборной или круглозвенной тяговой цепью, а также для контроля движения
Рисунок 2 – Датчик контроля скорости УПДС
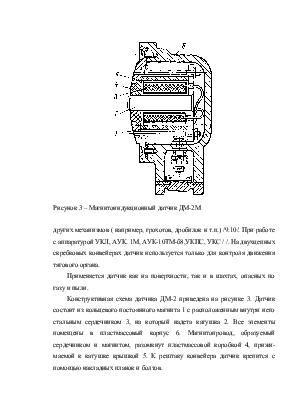
Рисунок 3 – Магнитоиндукционный датчик ДМ-2М
других механизмов ( например, грохотов, дробилок и т.п.) /9.10/. При работе с аппаратурой УКЛ, АУК. 1М, АУК-10ТМ-б8,УКПС, УКС / /. На двухцепных скребковых конвейерах датчик используется только для контроля движения тягового органа.
Применяется датчик как на поверхности, так и в шахтах, опасных по газу и пыли.
Конструктивная схема датчика ДМ-2 приведена на рисунке 3. Датчик состоит из кольцевого постоянного магнита 1 с расположенным внутри него стальным сердечником 3, на который надета катушка 2. Все элементы помещены в пластмассовый корпус 6. Магнитопровод, образуемый сердечником и магнитом, разомкнут пластмассовой коробкой 4, прижимаемой к катушке крышкой 5. К рештаку конвейера датчик крепится с помощью накладных планок и болтов.
При прохождении звеньев цепи конвейера над разомкнутой частью магнитопровода в катушке, наводится ЭДС, подаваемая с помощью кабеля на вход реле скорости.
Датчик ДМ-2М отличается от Ж-2 повышенной герметичностью и выходной мощностью /до 0.75 1СГ-3 Вт/, что позволяет увеличить рабочий зазор между магнитной системой датчика и скребковой цепью и таким образом повысить его надежность за счет устранения трения цепи о датчик. Диапазон контролируемых скоростей от 0.4 до 1.6 м/с; мощность, развиваемая датчиком ДМ-2М при нагрузке 2 кОм, установленной на стороне выпрямленного напряжения, при движении скребковой цепи типа Р1-80 над датчиком на высоте не менее 10 мм со скоростью не более 1 м/с должна быть не менее 0.75 мВт; уровень защиты РО; вид взрывозащиты Иа.
В настоящее время разработан датчик ДМ-3, который предназначен для контроля движения цепи шахтных скребковых конвейеров и других движущихся механизмов /грохотов, дробилок, элеваторов, лебедок /. Установочные размеры датчика обеспечивают возможность применения его на конвейерах с толщиной днища рештака от 6 до 20 мм. Конструктивно датчик ДМ-3 выполнен в виде ферромагнитного стакана - магнитопровода с расположенным внутри его постоянным цилиндрическим магнитом, на который надета катушка. Параллельно катушке подключены два стабилитрона. Сверху магнитопровод (стакан) разомкнут. Действие датчика аналогично действию датчика ДМ-2М, однако за счет более эффективной магнитной системы снижена себестоимость изготовления и масса датчика, которая составляет 3.2 кг ( ДМ-2М -4.5 кг ).
1.3 Датчик бесконтактного контроля вращения БКВ.
Датчик БКВ предназначен для выработки сигнала, используемого Для бесконтактного контроля скорости ленты ленточного конвейера в Устройствах УКГЮ и УКС /9/. Область и условия применения датчика в
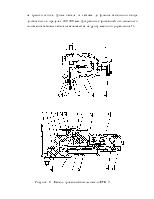
Рисунок 4 – Датчик бесконтактного контроля вращения БКВ
шахтах соответствуют области и условиям применения магнитоиндукционного датчика ДМ-2М, являющегося основной частью датчика БКВ.
Общий вид датчика БКВ приведен на рисунке 4. Датчик БКВ представляет собой вращающийся на подшипниках цилиндрический ролик 2 с пазами 5, установленный на раме 3 совместно с датчиком 4 типа ДМ-2М. Рама 3 имеет два отверстия 1 для шарнирного подсоединения датчика к элементам конструкции конвейера.
Принцип действия датчика БКВ заключается в следующем. Ролик датчика 2, взаимодействую с движущейся лентой конвейера, получает вращение, пропорциональное скорости ленты. При этом в активной зоне магнитоиндуктивного датчика попеременно проходят пазы 5 и перемычки ролика, чем изменяется сопротивление магнитной цепи. В катушке датчика наводится ЭДС, частота которой пропорциональна скорости движения ленты конвейера.
Амплитуда напряжения, вырабатываемого датчиком БКВ при частоте 15 Гц и нагрузке 1 кОм не менее 2В.
1.4 Датчик контроля схода ленты КСЛ-2
Датчик КСЛ-2 предназначен для контроля аварийного схода в сторону конвейерной ленты и подачи сигнала в систему дистанционного или автоматизированного управления, может применяться на всех ленточных конвейерах, работающих в шахте, а также на поверхности шахт в закрытых помещениях /9,10/. В шахтах, опасных по газу и пыли, датчик может коммутировать только искробезопасные цепи.
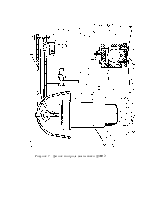
Конструктивная схема датчика КСЛ-2 приведена на рисунке 5. Датчик состоит из корпуса 2, гибкого провода и исполнительного устройства. Корпус 2 и крышка 1 выполнены из волокнита. В корпусе расположено исполнительное устройство, состоящее из магнитной системы 5 и геркона, заключенного в капсулу б, которая ввинчивается в шайбу 4 и фиксируется гайкой 3. Гибкий провод состоит из пружины 7, резинового кожуха 9 и восьми конических шайб 10, нанизанных на трос 8, связывающих магнитную систему с зажимом 11. В крышке датчика имеется два кабельных ввода 14, жилы кабеля подводятся к зажимам 13. электрически связанным с герконом. На корпусе датчика имеется металлическая планка 12, при помощи которой датчик крепится к грузовой опоре роликов конвейера. При воздействии на гибкий привод конвейерной ленты с помощью троса 8 происходит перемещение кольцевой магнитной системы вдоль капсулы, что приводит к замыканию контактов геркона. Датчики, поставляемые заводом, отрегулированы таким образом, что в исходном состоянии контакт разомкнут, а при отклонении вершины привода до 65 мм от вертикальной оси датчика контакт замыкается и остается замкнутым при дальнейшем отклонении провода.
Рисунок 5 – Датчик контроля схода ленты КСЛ-2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.