Модель «Водонапорная башня» позволяет имитировать работу системы автономного водоснабжения в различных режимах. Основными рабочими операциями системы являются наполнение накопительного резервуара водой с помощью насоса М1 и последующее опорожнение резервуара через сливной клапан Y1. При этом процесс наполнения или слива отображается на экране монитора изменением уровня воды в резервуаре.
Для контроля уровня наполнения резервуара предназначены сигнализаторы уровня, что позволяет моделировать как наполнение, так и опорожнение резервуара до определенного уровня. Каждый сигнализатор уровня снабжен переключателем «Ошибка датчика», который дает возможность имитировать неисправность сигнализатора. Выбор нужного уровня, а также состояния рабочего процесса (наполнение или слив) осуществляется кнопками на пульте управления. Здесь же расположены лампы Н1 - Н4, позволяющие индицировать дискретные уровни наполнения резервуара.
В виртуальной модели «Водонапорная башня» предусмотрена также возможность непрерывного контроля уровня воды в резервуаре с помощью аналогового датчика. Имитатор генерирует потенциальный сигнал в диапазоне 0...5 В, который можно подавать на аналоговый вход контроллера и тем самым использовать для непрерывного регулирования уровня воды в резервуаре. При этом скорость наполнения или слива задается с помощью потенциометров на панели задания параметров.
![]()
![]()
4. Заданиядлясамостоятельнойработы
В предлагаемых в данном разделе заданиях требуется разработать управляющую программу для ПЛК с центральным процессором CPU S7-222 фирмы «Siemens». Задания ориентированы на использование программного имитатора объектов управления COSIM, описанного в разделе 3.2. Этими заданиями не исчерпываются все возможности виртуальных моделей имитатора; преподаватель может по своему усмотрению предложить учащимся как более простые, так и более сложные варианты заданий.
Решения всех заданий приведены в разделе 5.
4.1. Задание для модели «Лифт»
Требуется разработать систему управления пассажирским лифтом с программируемым логическим контроллером с центральным процессором CPU S7-222. Виртуальная модель «Лифт» показана на рис. 4.1.
Предлагается реализовать следующий алгоритм работы лифта. Лифт должен осуществлять подъем на 2-ой и 3-ий этажи. Опускание кабины должно выполняться только при нажатии кнопки вызова лифта на 1-м этаже. Номер этажа, на котором находится лифт или мимо которого он проходит в данный момент времени, должен высвечиваться на указателе в кабине лифта.
Задание
1. Начертить граф переходов системы.
2. Составить список назначений в соответствии с описанием алгоритма работы лифта и определить внешние связи контроллера.
3. Разработать управляющую программу для ПЛК.
4. Загрузить программу в ПЛК.
5. Протестировать разработанную программу на имитаторе COSIM.
![]()

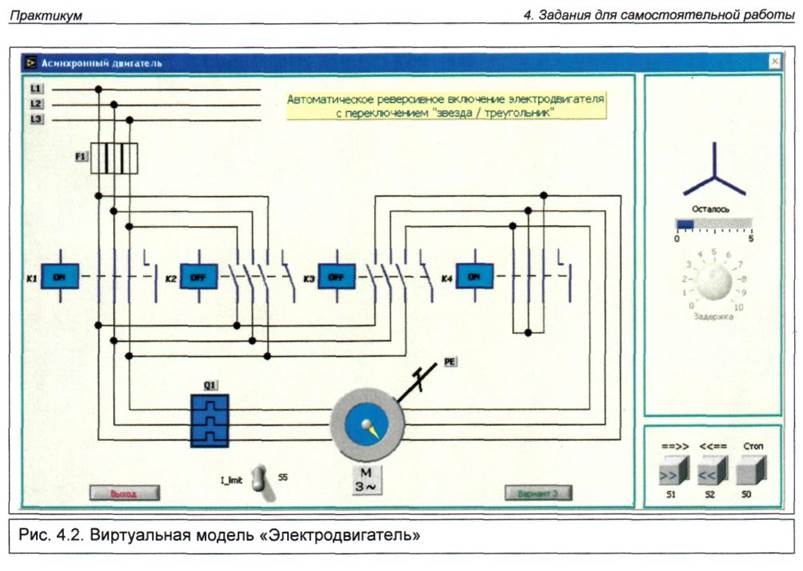
4.2. Задание для модели «Электродвигатель»
Вал асинхронного электродвигателя с короткозамкнутым ротором должен вращаться в обоих направлениях (рис. 4.2). Для исключения высоких пусковых токов электродвигатель должен включаться по схеме «звезда» и через определенное время переключаться на схему «треугольник». Требуется разработать управляющие программы для ПЛК, используя предлагаемые релейно-контактные схемы, для различных вариантов работы двигателя.
![]()
Вариант 1
В исходном положении пускатель К1 (вращение по часовой стрелке) и пускатель К2 (вращение против часовой стрелки) отключены. Двигатель включают нажатием кнопок: S1 - для приведения вала во вращение по часовой стрелке и S2 - против часовой стрелки. Соответствующий пускатель своими контактами включает контактор звезды К4 и реле времени К5 (реализуется программно). После периода пуска длительностью 5 с реле времени отключает контактор звезды К4 и включает контактор треугольника КЗ. Направление вращения вала может быть изменено только после отключения двигателя кнопкой SO независимо от состояния процесса. Состояние «включено» должно индицироваться сигнальными лампами Н1 и Н2 в соответствии с направлением вращения вала. При перегрузке двигатель должен автоматически отключаться тепловым реле Q1, срабатывание которого имитируется переключением тумблера S5.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.