ОАО «Российские железные дороги»
Красноярский учебный центр - образовательное структурное подразделение
Красноярской железной дороги
К.В. Серебряков
ОПОРНО – ПОВОРОТНЫЙ МЕХАНИЗМ
КРАНОВ – МАНИПУЛЯТОРОВ
АГД - 1А, АГС – 1Ш, АСГ - 30
Учебно-методическое пособие для изучения устройства, эксплуатации и технического обслуживания опорно-поворотного механизма
кранов-манипуляторов

2013 г
|
Рассмотрено и одобрено на заседании цикловой комиссии «____»_______________20 г. ______________ К.В. Серебряков |
|
Заместитель начальника Красноярского учебного центра образовательного структурного подразделения Красноярской железной дороги __________Л.Н. Ларькова |
|
|
Автор: преподаватель К.В. Серебряков Рецензенты: Преподаватель Красноярского учебного центра А.А. Ерёмин ____________________________ Начальник сектора ССПС Красноярской дирекции инфраструктуры А.А. Маско ________________ |
|
Оглавление
|
Введение .................................................................................................................... |
3 |
|
|
1. |
Опорно-поворотный механизм крана-манипулятора АГД-1А ……….. |
4 |
|
2. |
Опорно-поворотный механизм крана-манипулятора АГС-1Ш ……… |
7 |
|
3. |
Опорно-поворотный механизм крана-манипулятора АСГ-30 ………... |
10 |
|
4. |
Техническое обслуживание опорно-поворотного механизма |
|
|
кранов-манипуляторов АГД-1А, АГС-1Ш, АСГ-30 ……………………. |
13 |
|
|
Список литературы ……………………………………………………………… |
15 |
|
3
Введение
Грузоподъёмные краны-манипуляторы на железнодорожном транспорте занимают ведущее место в системе машин, предназначенных для механизации монтажных и погрузочно-разгрузочных работ. С помощью грузоподъёмных кранов-манипуляторов достигаются высокие темпы и индустриальность производства работ по уборке засорителей, погрузки сыпучих и погрузки-разгрузки штучных грузов. Объектами применения кранов-манипуляторов являются практически все железнодорожные пути станций и перегонов, а также площадки предприятий.
Грузоподъёмные краны-манипуляторы относятся к машинам цикличного действия, так как их рабочий процесс состоит из отдельных чередующихся циклов, включающих рабочие и вспомогательные периоды. Они обеспечивают обслуживание большой площадки рабочей зоны.
Задачи, стоящие перед железнодорожным транспортом, обязывают специалистов в области механизации погрузочно-разгрузочных работ непрерывно совершенствовать технику и методы её эксплуатации. Применение современных типов грузоподъёмных кранов-манипуляторов обеспечивает выполнение требований технологии производства погрузочно-разгрузочных работ, рост производительности и улучшение условий труда машинистов кранов-манипуляторов.
4
1. Опорно-поворотный механизм крана-манипулятора АГД-1А
Опорно-поворотный механизм крана-манипулятора АГД-1А реечного типа. Предназначен для поворота колонны.
Опорно-поворотный механизм (рис.1) состоит из корпуса, который представляет собой сварную конструкцию. К основанию 1 приварена вертикально труба 2 и рёбра жёсткости. В верхней и нижней части вертикальной трубы имеются бронзовые втулки, в которых установлена вал – шестерня с приваренной сверху колонной. Втулки воспринимают радиальные нагрузки от грузового момента и момента поворота. Нижняя втулка дополнительно воспринимает осевую нагрузку. Втулки выполнены из бронзы Бр. ОЦС 5-5-5.
К вертикальной трубе с каждой стороны в горизонтальном положении приварены две трубы 3. К торцам этих труб приварены фланцы, к которым при помощи болтов с обеих сторон крепятся гидроцилиндры 4 с находящимися внутри поршнями (рис.2). У каждого гидроцилиндра (рис.3) имеется штуцер, для крепления трубопровода подачи или отвода рабочей жидкости.
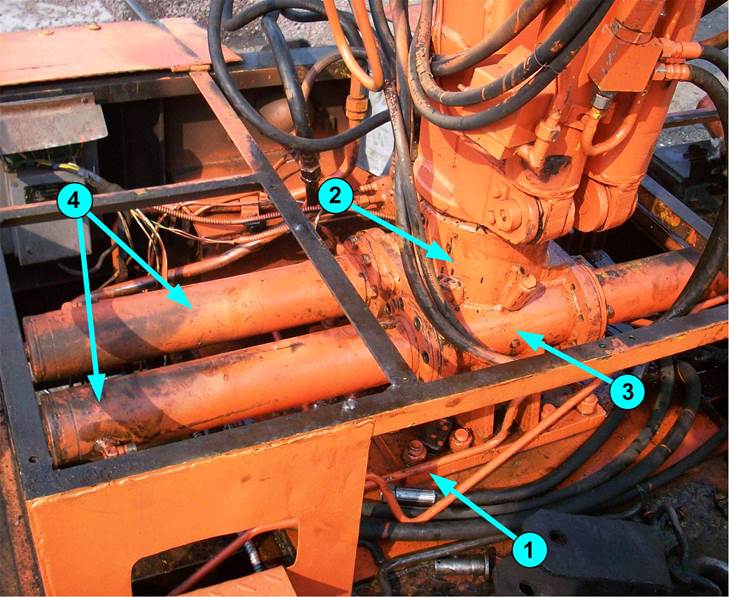
Рис. 1. Корпус опорно-поворотного механизма
1-основание; 2-вертикальная труба; 3-горизонтальная труба; 4-гидроцилиндры
5


Рис. 2. Поршень Рис. 3. Гидроцилиндр
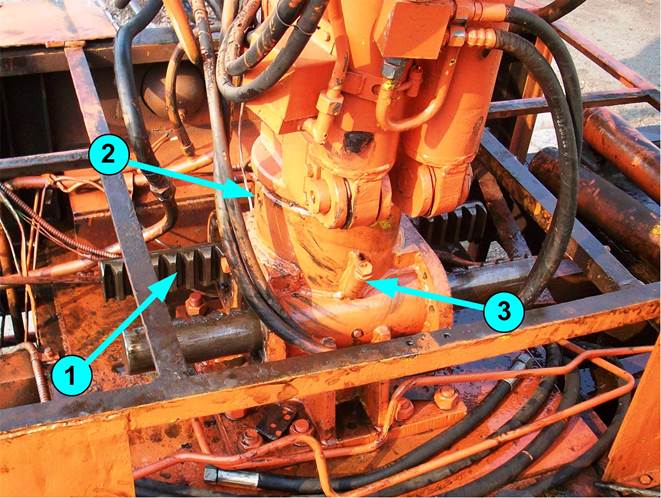
Рис. 4. Опорно-поворотный механизм
1-шток-рейка; 2-пресс-маслёнка; 3-заливная горловина с пробкой
6
Между поршнями устанавливаются шток - рейки (рис.4) 1, которые имеют зубья с внутренней стороны и перемещаются во втулках, закреплённых при помощи болтов в корпусе.
Втулки являются направляющими шток - реек и воспринимают радиальные нагрузки, возникающие в зубчатом соединении. Зубья шток - реек находятся в зацеплении с вал - шестерней.
Поршни «плавающего» типа, т.е. перемещаются независимо от шток - реек.
В вертикальной части трубы имеются две пресс-маслёнки 2 для смазки верхнего подшипника. Применяется смазка типа солидол «С» в объёме 100гр. Нижний подшипник смазывается маслом И-12А, И-20А или ВМГЗ, которое в объёме 10л заливается в корпус. Для залива масла в верхней части трубы имеется заливная горловина 3, закрытая пробкой. С торца корпуса имеются отверстия, закрытые пробками, для контроля верхнего и нижнего уровня масла (рис.5).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.