Лекция 6.Временные характеристики динамических звеньев и систем и способы их получения
Рассмотренные выше формы моделей динамических звеньев и систем являются общими, то есть содержат всю информацию о динамических свойствах моделируемого объекта, необходимую для решения задач теории управления. В то же время эти формы нельзя признать наглядными с точки зрения понимания и анализа отдельных свойств. Эту роль выполняют временные и частотные характеристики звеньев и систем, получаемые на основе моделей в общих формах.
В теории управления рассматриваются две временные характеристики – переходная и весовая.
Переходная характеристика (переходная функция) – это реакция звена или системы на входной сигнал в виде единичной ступенчатой функции (рисунок 40).
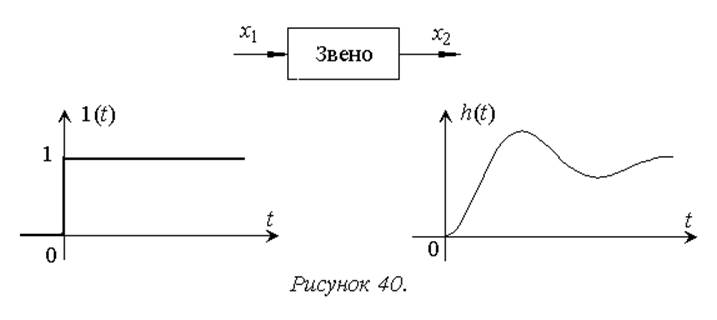
Рассмотрим основные способы (методы) получения переходной характеристики.
Классический метод – путем решения дифференциального уравнения звена или системы:

при нулевых начальных условиях.
В соответствии с определением переходной характеристики замене абстрактного входного сигнала x1 на единичную ступенчатую функцию будет соответствовать замена x2 на переходную характеристику (функцию):

или
 , где
, где
 .
.
Такая запись означает необходимость решения дифференциального уравнения
на
интервале времени ![]() с пересчетом заданных начальных
условий «слева от нуля» в начальные условия «справа от нуля» с использованием
коэффициентов при производных в правой части уравнения.
с пересчетом заданных начальных
условий «слева от нуля» в начальные условия «справа от нуля» с использованием
коэффициентов при производных в правой части уравнения.
Решение линейного неоднородного дифференциального уравнения ищут в виде суммы двух составляющих:
![]() , где
h0 – общее
решение, h* – частное
решение. В теории управления общее решение называют переходной составляющей,
частное решение – вынужденной составляющей:
, где
h0 – общее
решение, h* – частное
решение. В теории управления общее решение называют переходной составляющей,
частное решение – вынужденной составляющей:
![]() .
.
Переходную составляющую находят как решение однородного дифференциального уравнения:

в форме суммы экспонент с произвольными коэффициентами. В показателях степени экспонент используются корни характеристического уравнения
![]() .
.
Например, если все корни вещественные, причем кратные корни отсутствуют, переходная составляющая имеет вид:
 .
.
Вынужденную составляющую находят в форме, соответствующей правой части. Если правая часть – константа, вынужденная составляющая – также константа, и для ее нахождения достаточно в уравнении положить производные равными нулю.
В качестве примера получим переходную характеристику
апериодического звена 1-го порядка с уравнением:  .
.
В соответствии со сказанным выше требуется решить уравнение
на
интервале времени ![]() при нулевых начальных условиях,
причем благодаря отсутствию производных в правой части пересчет начальных
условий не требуется.
при нулевых начальных условиях,
причем благодаря отсутствию производных в правой части пересчет начальных
условий не требуется.
Характеристическое уравнение здесь имеет вид:
![]()
и
имеет один корень  .
.
В результате получим выражение для переходной составляющей:
 .
.
Вынужденная составляющая здесь ![]() .
.
Результирующее полное решение уравнения:
 .
.
Найдем
C1: ![]() , C1= -k.
, C1= -k.
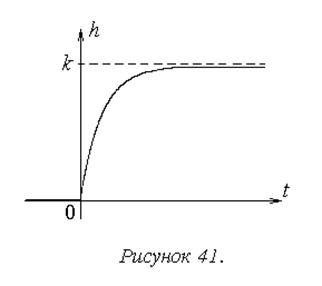
В результате получена переходная характеристика:
 .
.
Необходимо учесть, что в практических задачах переходные характеристики могут рассматриваться на различных временных интервалах. Для того, чтобы избавиться от необходимости отдельно указывать эту дополнительную информацию, выражения для переходных характеристик домножают на единичную ступенчатую функцию с соответствующим аргументом. Для рассматриваемого примера результат должен быть представлен в следующем виде:
 .
.
График переходной характеристики показан на рисунке 41.
Операторный метод – на основе передаточной функции звена или системы.
Данный метод следует рекомендовать прежде всего при наличии в правой части уравнения звена или системы производных, так как он не требует учета скачкообразного изменения начальных условий. В других случаях он так же, как правило, более удобен, чем классический.
Воспользуемся определениями передаточной функции и
переходной характеристики с учетом известного изображения по Лапласу единичной
ступенчатой функции  :
:
 .
.
Следовательно, при заданной передаточной функции изображение переходной характеристики можно найти по формуле:
 .
(6.1)
.
(6.1)
После этого переходная характеристика может быть найдена путем перехода от изображения к оригиналу одним из следующих способов:
- непосредственно с помощью таблицы изображений – в простейших случаях;
- разложением H(s) на сумму табличных изображений;
- с помощью теорем разложения.
Найдем переходную характеристику дифференцирующего звена с замедлением.
Передаточная функция звена  .
.
Найдем изображение переходной характеристики:
и воспользуемся следующей строкой из таблицы изображений.
|
Оригинал |
Изображение |
|
|
|
Преобразуем имеющееся изображение к табличному виду:
и с учетом линейности преобразования Лапласа получим искомую характеристику:
 .
.
График переходной характеристики показан на рисунке 42.
Найдем переходную характеристику интегрирующего звена с замедлением.
Передаточная функция звена  .
.
Найдем изображение переходной характеристики:
 .
.
Поскольку такое изображение в таблицах, как правило, отсутствует, разложим изображение на сумму:
 .
.
Приведя разложение к общему знаменателю
и приравняв числители полученного и исходного выражений, получим уравнения для коэффициентов:
AT+C=0,
A+BT=0,
B=k, откуда A= -kT, ![]() .
.
Слагаемые в разложении соответствуют следующим строкам таблицы изображений.
|
Оригинал |
Изображение |
|
1(t) |
|
|
|
|
|
|
|
В результате получим:
 .
.
Для построения характеристики сначала рассмотрим графики двух слагаемых полученного выражения, которые помогают получить итоговый график (рисунок 43).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.





