








Министерство образования РФ
Федеральное агентство по образованию
Новосибирский Государственный Технический Университет
Кафедра Автоматики

Разработка технического предложения
о возможности реализации системы
электропривода по требованиям
технического задания
Вариант: 01
Факультет: АВТ Преподаватель: Русаков О.П.
Группа: АА- 38
Студент: Белик А.С.
Дата сдачи: 22.12.06г.
Отметка о защите:
Новосибирск, 2006
Содержание
Введение. 3
1.1. Техническое задание. 3
1.2. Порядок выполнения работы.. 3
2. Предварительный выбор двигателя постоянного тока. 4
3. Построение диаграмм токов и моментов при пуске, торможении и установившемся движении. 5
4. Оценка тепловой нагрузки машины.. 7
5. Выбор способа управления частотой вращения двигателя. 8
6. Оценка параметров динамической модели двигателя и усилителя мощности. 10
Выводы.. 14
Список литературы.. 15
Современный электропривод значительную долю времени работает в переходных режимах, т. е. при изменяющейся скорости. Однако даже в стационарных режимах за счет возмущающих воздействий со стороны механизма довольно часты существенные колебания скорости. В переходных режимах пуска или торможения электропривода производственный процесс рабочей машины, как правило, либо не реализуется вовсе, либо протекает в заниженном темпе. Соответственно производительность рабочего органа в значительной мере зависит от быстроты протекания переходных процессов, и минимизация их длительности часто дает существенный выигрыш в выпуске изготовляемой продукции. Колебания скорости в стационарном режиме влияют на качество продукции, что вынуждает прибегать к стабилизации скорости.
Цель: Необходимость правильного выбора двигателя, его технических характеристик и оптимальной реализации способа управления двигателем.
Основные задачи: Расчет параметров и выбор наиболее подходящего двигателя постоянного тока (ДПТ), выбор и моделирование способа управления ДПТ, анализ результатов моделирования.
Средства для решения основных задач: Вычислительная среда MatLab 6.5, Simulink 5.0.
По заданным параметрам, представленных табл.1, и моменту нагрузки выбрать тип и мощность ДПТ для системы стабилизации скорости.
Таблица 1. Задание на курсовую работу
|
Номер интервала i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
1 |
1,5 |
1 |
1,5 |
1 |
1,5 |
1 |
|
|
20 |
-30 |
40 |
-50 |
60 |
-70 |
80 |
По заданной тахограмме и моменту нагрузки выбрать тип и мощность двигателя постоянного тока (ДПТ) для системы стабилизации скорости.
Момент
нагрузки: момент сухого трения ![]() .
.
Длительность
интервала работы ДПТ ![]() при частоте вращения
при частоте вращения ![]() приведены в табл.1. Длительность паузы в
работе ДПТ
приведены в табл.1. Длительность паузы в
работе ДПТ ![]()
1.2.1. На основании тахограмм и момента нагрузки Мнаг рассчитать среднеквадратичную мощность и сделать предварительный выбор двигателя. При необходимости применить редуктор (мультипликатор). При расчете КПД редуктора принять равным 0,75.
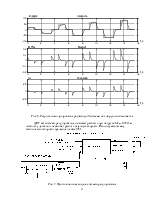
1.2.2. Рассчитать и построить диаграммы токов и моментов при пуске, торможении и установившемся движении (принять Мторм = 3,5 Мнаг).
1.2.3. Выполнить проверку выбранного двигателя по теплу, используя метод эквивалентного тока или момента.
1.2.4. Выбрать и обосновать способ управления двигателем.
1.2.5. Разработать математическую модель схемы управления двигателем.
1.2.6. Выполнить оценку параметров динамической модели двигателя и усилителя мощности.
Основные расчетные соотношения
Полная длительность цикла работы ДПТ:
 .
.
Рис. 1. Тахограмма частоты вращения ДПТ
Для
предварительного выбора ДПТ необходимо на основании тахограмм и ![]() необходимо рассчитать среднеквадратичную
мощность двигателя:
необходимо рассчитать среднеквадратичную
мощность двигателя:
 , где
, где ![]() – полная механическая мощность,
развиваемая двигателем в интервал времени
– полная механическая мощность,
развиваемая двигателем в интервал времени ![]() , причем
, причем
![]() .
.
Таблица 2. Мощность на i - ом интервале
|
Номер интервала i |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Pi, Вт |
5 |
7,5 |
10 |
12,5 |
15 |
17,5 |
20 |
Частота вращения двигателя в оборотах в минуту выражается через частоту вращения в радианах в секунду следующим образом:
 .
.
Максимальная скорость, развиваемая ДПТ должна быть не меньше
.

Учитывая
такие параметры ДПТ как ![]() ,
, ![]() и
и ![]() , можно
выбрать двигатель типа СЛ-571К, обладающий следующими основными техническими
характеристиками:
, можно
выбрать двигатель типа СЛ-571К, обладающий следующими основными техническими
характеристиками:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.