В квазиустановившемся
режиме работы ДПТ развивает вращающий момент, среднее значение которого
связано со средним значением тока зависимостью ![]() . При
этом к якорю подводится напряжение, среднее значение которого
. При
этом к якорю подводится напряжение, среднее значение которого ![]() определяется относительным временем
замкнутого состояния транзисторного ключа (скважностью)
определяется относительным временем
замкнутого состояния транзисторного ключа (скважностью)
 , где
, где ![]() – длительность замкнутого состояния ключа;
– длительность замкнутого состояния ключа;
![]() – длительность цикла.
– длительность цикла.
Изменение скважности позволяет регулировать угловую скорость ДПТ в широких пределах. Наибольшее распространение нашло широтно-импульсное управление, при котором изменятся длительность замкнутого состояния ключа при неизменной длительности цикла.
В соответствии с
исходными данными устройство управления ДПТ должно обеспечивать возможность
реверсивного управления. Это можно осуществить по мостовой схеме ШИП.
Функциональная схема устройства импульсного управления ДПТ показана на рис._4. Диоды VD1…VD4 служат для замыкания цепи якоря через источник напряжения
в те отрезки времени, когда ток якоря течет под действием ЭДС самоиндукции
навстречу напряжению источника. Ключи управляются с помощью, например,
8-разрядного микроконтроллера DD1. Ключи работают
одновременно, т.е. на интервале ![]() замкнуты, например,
ключи VT1, VT3 и на верхний
зажим якоря подан плюс, а на интервале
замкнуты, например,
ключи VT1, VT3 и на верхний
зажим якоря подан плюс, а на интервале ![]() замкнуты
ключи VT2…VT4 и на верхний
зажим подан минус источника. В результате на ДПТ M1 подается
напряжение
замкнуты
ключи VT2…VT4 и на верхний
зажим подан минус источника. В результате на ДПТ M1 подается
напряжение  . Учитывая, что
. Учитывая, что ![]() , механическая
характеристика определяется выражением
, механическая
характеристика определяется выражением
Изменяя![]() , можно изменять не только значение, но и
направление угловой скорости. При 1³g³0,5 угловая скорость при холостом ходе
положительна, при 0,5³g³0 она отрицательна.
, можно изменять не только значение, но и
направление угловой скорости. При 1³g³0,5 угловая скорость при холостом ходе
положительна, при 0,5³g³0 она отрицательна.
Для того чтобы сузить зону прерывистого тока можно осуществлять разновременную работу ключей. Для одного направления вращения переключается VT1 при постоянно замкнутом VT3 и разомкнутых VT2 и VT4, для другого – ключ VT2 при постоянно замкнутом VT4 и разомкнутых VT1 и VT3.
Рис. 4. Функциональная схема управления ДПТ
Расчеты ведутся в относительных единицах, но при выводе результатов моделирования относительные единицы приводятся к номинальным значениям выбранного двигателя.
С помощью данных, представленных табл. 3, произведен расчет параметров для моделирования двигателя СЛ – 571К:
 ;
;
 ;
;  ;
;
 ;
;
 .
.
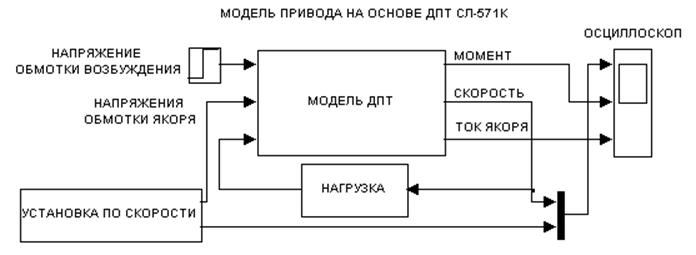
Рис. 5. Модель ДПТ независимого возбуждения
Рис. 6. Результаты моделирования разомкнутой системы без нагрузочного момента
ДПТ без системы регулирования, не может работать при нагрузке Мнаг=0,25 Н·м, поскольку двигатель не сможет развить заданную скорость. Используем систему стабилизации скорости вращения на базе УМ.
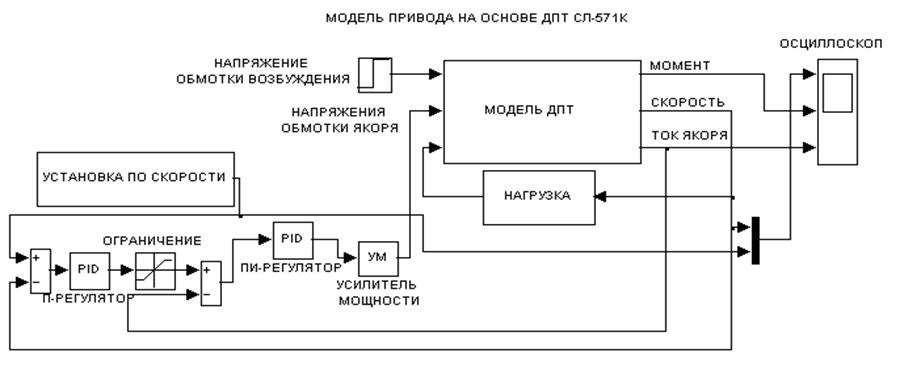
Рис. 7. Функциональная модель системы регулирования
Рис. 8. Результаты моделирования
Введем в систему широтно-импульсный преобразователь согласно структурной схеме, которая приведена на рис. 9.
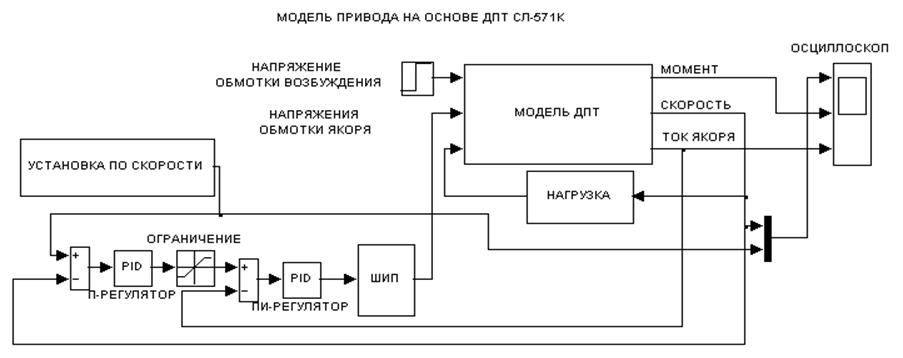
Рис. 9. Блок-диаграмма реализации ШИП
Рис. 10. Результаты моделирования с использованием ШИП
По результатам моделирования можно сделать следующие выводы:
1. Применение ШИП не отразилось на изменении скорости двигателя. При использовании ШИП появились пульсации тока якоря и момента (высокочастотная составляющая) в установившемся режиме, что обусловлено высокой частотой переключения ШИПа. Ток якоря ненамного превышает номинальное значение, в моменты торможения, то нет необходимости вводить дополнительные ограничения.
2. В моменты торможения, ток якоря принимает отрицательные значения и в структурной схеме ШИП не предусмотрено дополнительных сопротивления, которые коммутируются при противовключении двигателя, для гашения кинетической энергии, поэтому такой режим работы будет соответствовать режиму динамического торможения ДПТ.
3. Для того чтобы улучшить результаты моделирования можно выбрать по каталогу другой двигатель, исходя из расчетов, либо использовать иную систему управления частотой вращения двигателя.
Коэффициенты ПИД-регуляторов можно определить методом подбора, что объясняется легкостью компьютерного моделирования средствами MatLab и тем, что применение регулярных методов подбора коэффициентов затруднено из-за ограничений уровня сигнала. Выбранные коэффициенты обеспечивают процессы в системе, без перерегулирования и с наименьшей статической ошибкой.
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика». – 2-е изд. – М.: Высшая школа, 1986.
2. Кондратьев В. А. Проектирование средств и систем автоматики. Учеб. Пособие. – Новосибирск: Изд-во НГТУ, 1998.
3. Русаков О.П. «Технические средства систем автоматики и управления», курс лекций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.