оМинистерство образования и науки РФ
Государственное образовательное учреждение высшего профессионального образования
Новосибирский Государственный Технический Университет

Кафедра Автоматики
Лабораторная работа № 2
«Датчик углового положения на основе вращающегося трансформатора»
|
Факультет: |
АВТ |
|
Группа: |
АА-86 |
|
Студенты: |
Земцов Н. Баранова А. Таскаева К. |
|
Преподаватель: |
Русаков О.П. |
|
Дата: |
27.10.2011г. |
Новосибирск, 2011
Изучить работу вращающегося трансформатора и основные схемы его включения. Освоить алгоритмическую и аппаратную реализацию основных типов датчиков углового положения на основе ВТ.
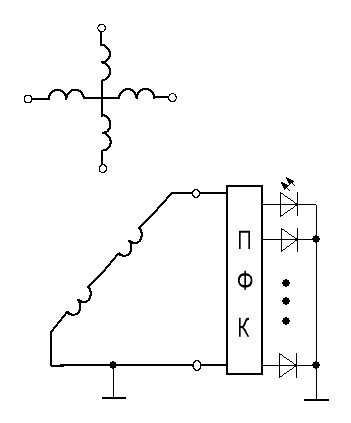
рис 1. Функциональная схема датчика с вращающимся магнитным полем
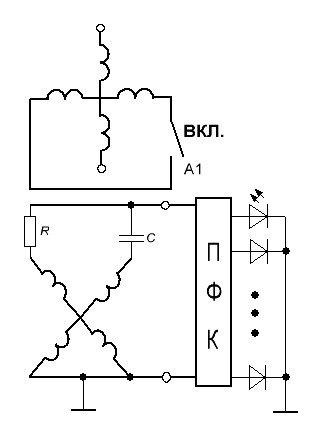
рис 2. Функциональная схема датчика с пульсирующим магнитным полем
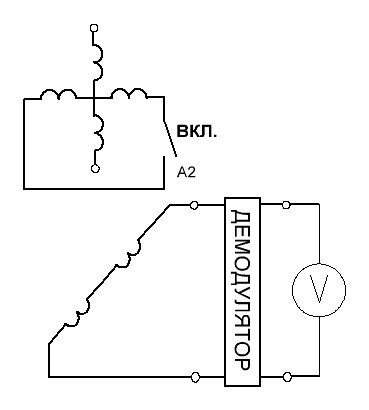
рис 3. Функциональная схема датчика с синус-косинусным преобразователем
Меняя положение ВТ снимем статические характеристики для 3 схем:
· схема 1 - ЭМФ с вращающимся магнитным полем;
· схема 2 - ЭМФ с пульсирующим магнитным полем;
· схема 3 - синус-косинусный преобразователь.
Результаты отображены в таблице 1.
Таблица 1.
|
Схема 1 |
Схема 2 |
Схема 3 |
|||||||||
|
Угол, ° |
Код |
Угол, ° |
Код |
Угол, ° |
Код |
Угол, ° |
Код |
Угол, ° |
Код |
Угол, ° |
Код |
|
-36 |
1 |
180 |
109 |
0 |
3 |
260 |
133 |
0 |
0,22 |
240 |
-0,96 |
|
-25 |
5 |
200 |
120 |
3 |
5 |
280 |
139 |
20 |
0,58 |
255 |
-1 |
|
-15 |
11 |
220 |
131 |
20 |
15 |
300 |
149 |
40 |
0,82 |
260 |
-1 |
|
-5 |
15 |
240 |
141 |
40 |
27 |
320 |
159 |
60 |
0,98 |
280 |
-0,94 |
|
0 |
19 |
260 |
151 |
60 |
35 |
340 |
171 |
65 |
1 |
300 |
-0,73 |
|
4 |
21 |
280 |
160 |
80 |
43 |
354 |
179 |
90 |
1 |
320 |
-0,5 |
|
20 |
29 |
300 |
169 |
100 |
51 |
355 |
1 |
100 |
0,94 |
340 |
-0,14 |
|
40 |
41 |
320 |
177 |
120 |
59 |
360 |
5 |
120 |
0,76 |
350 |
0,4 |
|
60 |
51 |
325 |
179 |
140 |
69 |
369 |
11 |
140 |
0,48 |
360 |
0,22 |
|
80 |
61 |
326 |
1 |
160 |
81 |
160 |
0,14 |
||||
|
100 |
71 |
335 |
5 |
180 |
93 |
168 |
0 |
||||
|
120 |
79 |
345 |
11 |
200 |
105 |
180 |
-0,22 |
||||
|
140 |
87 |
355 |
15 |
220 |
117 |
200 |
-0,56 |
||||
|
160 |
97 |
240 |
125 |
220 |
-0,8 |
||||||
рис 4. Статические характеристики датчиков по схеме 1 и схеме 2
рис 5. Статическая характеристика датчика по схеме 3
Осциллограммы снимались с 1мс/см по оси абсцисс и 10V/см по оси ординат.
рис 6. Схема 1, напряжение в роторной обмотке
рис 7. Схема 2, напряжение в точке R
рис 8. Схема 2, напряжение в точке C
рис 9. Схема 2, напряжение в точке RC
рис 10. Схема 3, напряжение до демодулятора
рис 11. Схема 3, напряжение после демодулятора
В ходе лабораторной работы мы изучили работу вращающегося трансформатора и основные схемы его включения. Освоили алгоритмическую и аппаратную реализацию основных типов датчиков углового положения на основе ВТ.
Датчик измеряет положение (угол) ВТ в пределах от 0° до 360° измеренное и преобразованное значение выводится в виде кода.
В лабораторной были рассмотрены 3 схемы включения:
· схема 1 - ЭМФ с вращающимся магнитным полем имеет линейную статическую характеристику. Обмотки статора включают сдвинутые на 90° магнитные оси, запитываются в противофазе. При изменении угла между ротором и статором ВТ пропорционально сдвигается фаза ЭДС;
· схема 2 - ЭМФ с пульсирующим магнитным полем имеет линейную статическую характеристику. Первая обмотка подключена напрямую, вторая сдвинута на 90°;
· схема 3 - синус-косинусный преобразователь имеет синусоидальную статическую характеристику. ЭДС функционально связана с углом поворота. Для использования схема в качестве датчика необходим демодулятор.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.