





Электромеханические свойства ЭМС на основе
двигателей постоянного тока независимого возбуждения.
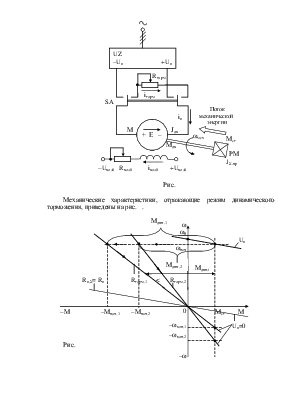
Двигатель постоянного тока независимого возбуждения представляет собою электрическую машину, которая имеет силовую обмотку, расположенную на вращающемся якоре машины, и обмотку возбуждения, создающую основной магнитный поток машины и расположенную на ее полюсах. Ток, протекающий по силовой обмотке, находящейся в магнитном поле, создает момент, приводящий якорь во вращение. Каждая из указанных обмоток в общем случае получают напряжение питания от независимых источников постоянного тока, что образует два канала управления двигателем постоянного тока. В воздушном зазоре между полюсами и якорем происходит электромеханическое преобразование электрической энергии в механическую, приводящую во вращение якорь машины, который в свою очередь приводит в движение технологическое оборудование. На рис. приведена обобщенная схема электромеханической системы с двигателем постоянного тока независимого возбуждения. Якорная цепь двигателя М, состоящая из обмотки якоря, обладающей активным сопротивлением RЯ и индуктивностью LЯ, обмотки дополнительных полюсов (ДП) или компенсационной обмотки (КО), добавочного Rдоб, сглаживающего дросселя L, подключена к выходу управляемого полупроводникового выпрямителя UZ1. ЭДС на выходе этого выпрямителя Еd, пропорциональна напряжению управления на его входе Uупр, снимаемое с регулятора задания Rзад. Обмотка возбуждения Lоб.в, обладающая активным сопротивлением Rв и индуктивностью Lв, подключена к выходу управляемого полупроводникового выпрямителя UZ2, напряжение на выходе которого Uвозб, пропорционально напряжению управления на его входе Uупр.в, снимаемое с регулятора задания Rзад.в. Двигатель М, обладающий моментом инерции Jдв, развивает на своем валу момент Мдв и приводит в движение рабочий механизм РМ, имеющий суммарный приведенный момент инерции JΣ.пр и создающий статический момент нагрузки для электродвигателя Мст. Для приведенных электрических цепей можно записать следующие выражения:
для цепи якоря  , где
, где ![]() – ЭДС
якоря,
– ЭДС
якоря, ![]() – сопротивление якорной цепи якоря.
– сопротивление якорной цепи якоря.
для цепи возбуждения  .
.
Электромагнитный момент
двигателя представляется в виде ![]()
Решая совместно вышеприведенные уравнения при Ф=const, что позволяет линеаризировать характеристики, можно их представить в следующем виде:
для механической
характеристики  , для электромеханической
характеристики
, для электромеханической
характеристики  .
.
Эти уравнения описывают поведение двигателя, как в статических, так и в переходных режимах. В статических режимах, когда dM/dt = diя /dt = 0 приведенные уравнения выглядят так
 ,
,  .
.
Графически механические характеристики в плоскости ω
– М представляют собой прямую линию, проходящую через точку идеального
холостого хода  , когда М=0 или iя =0,
и точку короткого замыкания
, когда М=0 или iя =0,
и точку короткого замыкания  , когда ω=0, рис. .
, когда ω=0, рис. .
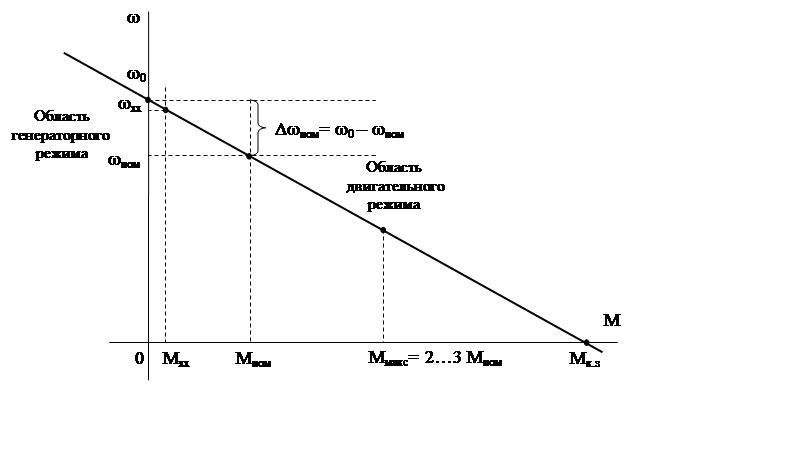
Рис.
Механическая характеристика,
расположенная в первом квадранте, соответствует двигательному режиму работы
двигателя, а в четвертом – генераторному режиму. Характеристика имеет
определенный наклон к оси абсцисс. Это характеризует стабильность работы
двигателя по скорости при изменении статической нагрузки на его валу и
оценивается модулем жесткости статической механической характеристики. В общем
виде модуль жесткости имеет следующее выражение  . Для
механической характеристики двигателя постоянного тока независимого возбуждения
модуль жесткости примет вид
. Для
механической характеристики двигателя постоянного тока независимого возбуждения
модуль жесткости примет вид  . Чем большее значение
имеет модуль жесткости, тем меньше перепад скорости при изменении статической
нагрузки на валу, тем жеще механическая характеристика, тем качественнее
выполняется технологический процесс. Это свойство механической характеристики
(ее стабильность) можно оценить и статическим перепадом скорости Δω= ω0
– ω или статизмом, который является величиной обратно
пропорциональной модулю жесткости Δω=Мном / β.
. Чем большее значение
имеет модуль жесткости, тем меньше перепад скорости при изменении статической
нагрузки на валу, тем жеще механическая характеристика, тем качественнее
выполняется технологический процесс. Это свойство механической характеристики
(ее стабильность) можно оценить и статическим перепадом скорости Δω= ω0
– ω или статизмом, который является величиной обратно
пропорциональной модулю жесткости Δω=Мном / β.
Электродвигатель проектируется и изготавливается для определенного расчетного режима, называемого номинальным режимом. Основные номинальные параметры – это Рном,Uном, ωном, ηном, Iном, (cosφном – коэффициент мощности). Механическая характеристика М=f(t), полученная при таких номинальных параметрах как Uном, Фном и осутствии добавочного сопротвления в цепи обмотки якоря (Rдоб = 0) называется естественной. Анализируя математическое выражение механической характеристики, видно, что при различных параметрах и воздействиях имеется различное ее положение в системе координат ω – М. Эти характеристики носят название искусственных. Таковыми параметрами и воздействиями являются:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.