–
суммарное сопротивление якорной цепи ![]() ,
,
– магнитный поток машины Ф,
– приложенное к якорной цепи напряжение Uя.
Остановимся на наиболее используемом в настоящее время способе получения искусственных характеристик – изменении напряжения на обмотке якоря (первый канал управления). Эти характеристики носят также название регулировочных, рис. . Полученные таким способом регулировочные характеристики достаточно точно сохраняют свой модуль жесткости, что позволяет получить значительный диапазон регулирования скорости D > 1000. Благодаря использованию в качестве преобразовательного устройства полупроводниковых преобразователей можно получать незначительные приращения управляющего воздействия на обмотке якоря двигателя, чем достигается высокая плавность регулирования. стремящаяся к единице. Изменение управляющего воздействия Uя возможно только в сторону уменьшения значения, что приводит к уменьшению скорости и определяет первую зону регулирования электропривода постоянного тока. В этой зоне регулирование происходит при постоянном значении момента и переменном значении мощности Р = М·ω. Существенное повышение напряжения на обмотке якоря с целью увеличения скорости не используется по условиям работы коллектора двигателя и по условиям эксплуатации его изоляции.
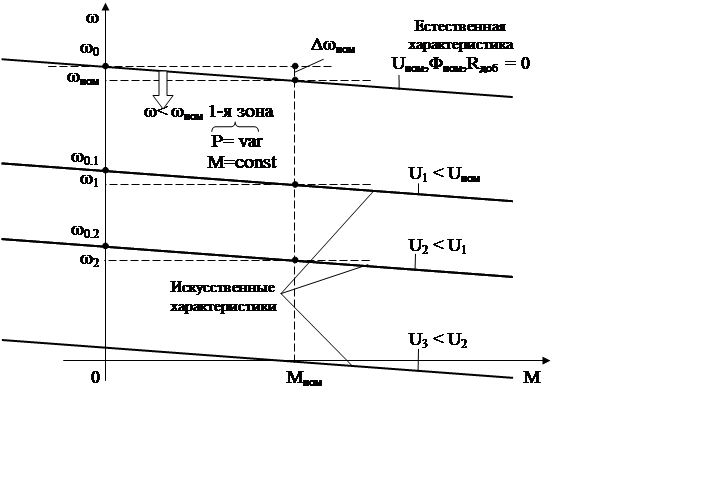
Рис.
Кроме качественных регулировочных характеристик рассматриваемый способ регулирования позволяет сформировать качественные пусковые свойства электропривода постоянного тока. Во-первых, данный способ регулирования позволяет плавно увеличивать значение момента двигателя в процессе пуска электропривода до значения момента статического сопротивления. Это позволяет выбрать люфты и зазоры за счет предварительного поворота звеньев в кинематических передачах. Во-вторых, в процессе дальнейшего управляемого пуска можно создать момент двигателя вплоть до максимального значения, что позволяет получить различные значения динамического момента, а значит, и различное ускорение: от допустимого значение до ускорения, обеспечивающее максимальное быстродействие (минимальное время переходного процесса).
Рассматриваемый способ управления скоростью двигателя позволяет получить качественные тормозные свойства, аналогичные пусковым свойствам. При торможении, связанным с уменьшением питающего напряжения на обмотке якоря, в зависимости от интенсивности его уменьшения режим торможения с точки зрения энергетики может выполняться или в первом квадранте или в четвертом. Подробно это рассматривается в разделе о переходных процессах. Особым режимом торможения в смысле его получения является режим динамического торможения. Это такой режим, в котором обмотка якоря двигателя, вращающаяся в его магнитном поле, отключается от источника питания и подключается на активное сопротивление. Общая схема динамического торможения приведена на рис. .
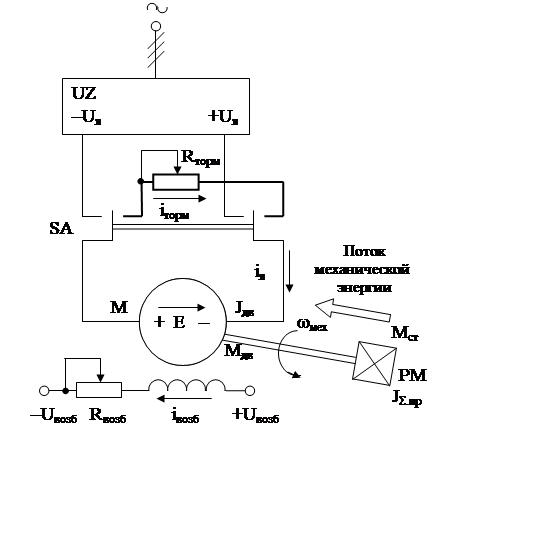
Рис.
Механические характеристики, отражающие режим динамического торможения, приведены на рис. .
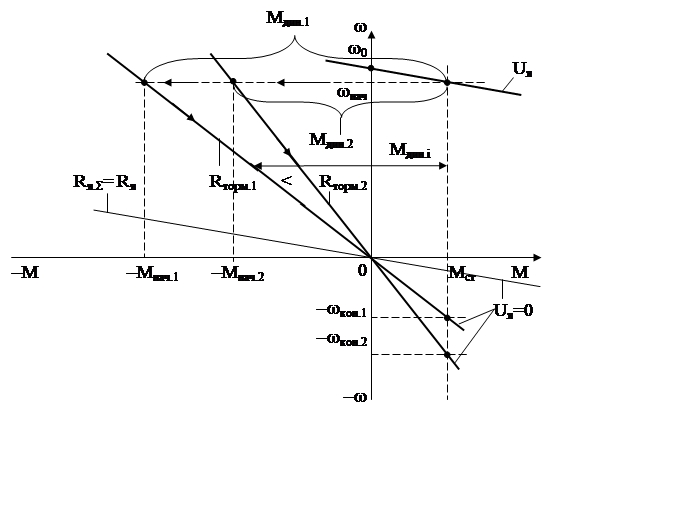
Рис.
Основные уравнения, характеризующие процесс динамического торможения, имеют следующий вид:
уравнение электрического равновесия ![]() , где
, где ![]() , уравнение
движения
, уравнение
движения  .
.
Совместное решение этих уравнений относительно скорости ω имеет вид
 .
.
Постоянная интегрирования С определяется из начальных условий при t=0:
![]() , где ωнач –
частота вращения двигателя в момент переключения из двигательного режима на
динамическое торможение,
, где ωнач –
частота вращения двигателя в момент переключения из двигательного режима на
динамическое торможение,  – абсолютное значение
перепада скорости, определенное по характеристике динамического торможения при
моменте Мст. Подставляя постоянную интегрирования в решение
уравнения, получим окончательное выражение для скорости
– абсолютное значение
перепада скорости, определенное по характеристике динамического торможения при
моменте Мст. Подставляя постоянную интегрирования в решение
уравнения, получим окончательное выражение для скорости  . Данное выражение описывает переходный
процесс торможения электропривода, работающего со статической нагрузкой. В
случае отсутствия момента статической нагрузки (Мст=0, Δωст=0,
ωнач=ω0) переходный процесс описывается следующим
выражением
. Данное выражение описывает переходный
процесс торможения электропривода, работающего со статической нагрузкой. В
случае отсутствия момента статической нагрузки (Мст=0, Δωст=0,
ωнач=ω0) переходный процесс описывается следующим
выражением  . Зависимости ω=f(t) для
рассмотренных выше процессов приведены на рис. .
. Зависимости ω=f(t) для
рассмотренных выше процессов приведены на рис. .
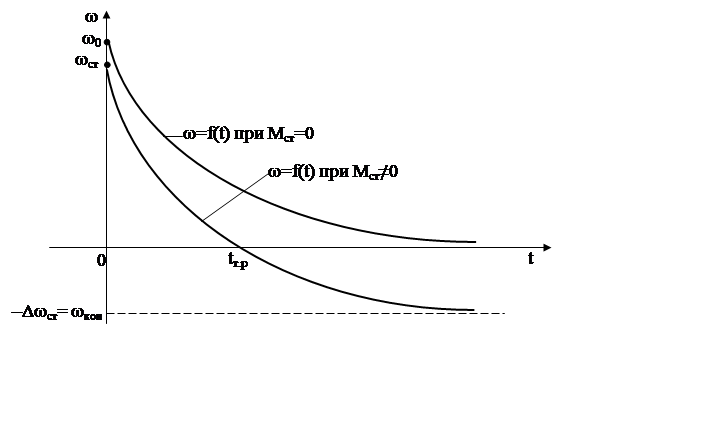
Рис.
При работе электропривода с активным моментом статического сопротивления кривая скорости ω=f(t) стремится к (–Δωст= ωкон), а при работе с реактивным моментом процесс торможения заканчивается в точке при tт.р.
По аналогичной методике можно получить выражения для тока якоря iя =f(t) в режимах динамического торможения с моментом статической нагрузки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.