Рис.
5. Механические характеристики
В качестве устройства регулирования для управления электродвигателем мощностью 1,25 кВт, используем тиристорный преобразователь типа 514С концерна Eurotherm Drives.
Данные преобразователя:
Uном = 320В
Iном = 16А
Т.к в приводе перемещения крана имеется два двигателя, то принимаем два преобразователя типа 514С.
Все переходные процессы за цикл можно разделить на несколько этапов:
Первый этап: интервал
времени ![]()
Скорость вращения на этом интервале равна нулю, т.к. М < Mс.
Время задержки tЗ1 при перемещении с грузом определяется по формуле:
Время задержки tЗ2 при перемещении без груза определяется по формуле:
Момент двигателя изменяется согласно формуле:
![]()
Второй
этап: интервал времени ![]()
Изменение скорости происходит согласно формуле:
![]()
Момент двигателя изменяется согласно следующей формуле:
![]()
где t’ = t – tЗ
Tм – механическая постоянная времени, рассчитывается по формуле:
Постоянная времени при перемещении механизма с грузом:

Постоянная времени при перемещении механизма без груза:

Третий
этап: интервал времени ![]() . t1 = 58,25 сек.
. t1 = 58,25 сек.
Изменение скорости происходит согласно формуле:
![]()
где Dwс – падение скорости от статического момента:
![]()
Момент двигателя изменяется соответственно следующей формуле:
![]()
где t’’ = t – tразг
Четвертый этап: интервал
времени ![]() . t2
= 75 сек.
. t2
= 75 сек.
Изменение скорости происходит согласно формуле:
![]()
Момент двигателя изменяется соответственно следующей формуле:
![]()
где t’’’ = t – t1
Пятый этап: интервал
времени ![]() .
.
Изменение скорости происходит согласно формуле:
![]()
Момент двигателя изменяется соответственно следующей формуле:
![]()
где t’’’ = t – t2
На всех этапах ток якоря рассчитывается по формуле:
Выполняем расчет по вышеописанным формулам и результаты расчетов сводим в таблицу 1.
Расчет потерь мощности произведем по приближенным формулам на основании упрощенной скоростной и нагрузочной диаграмм (рис 2).
Потери на возбуждение на всех этапах составляют:
Номинальные потери двигателя составляют:

Номинальные потери в стали и механические потери:
![]()
![]()
Принимаем DРст ном = 28,32 Вт; DРмх ном = 14,16
На этапе разгона (торможения) механические потери рассчитываются по формуле:
На этапе разгона (торможения) потери в стали рассчитываются по формуле:
На этапе разгона (торможения) переменные потери рассчитываются по формуле:

На этапе движения с постоянной скоростью потери в стали и механические потери равны номинальным, а переменные потери рассчитываем по формуле:
Рассчитаем потери при разгоне механизма с грузом по вышеприведенным формулам:


Аналогично производим расчет потерь для остальных участков. Результаты расчетов приведены в таблице 2.
По результатам расчета строим кривые w(t), M(t), I(t), DP(t) которые представлены на рис. 6.
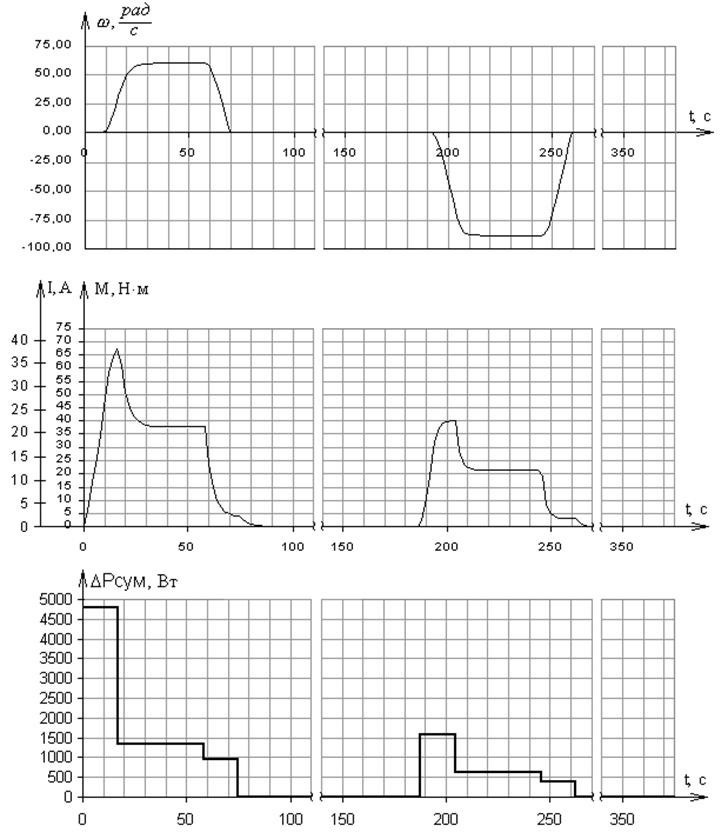
Рис. 6. Переходные характеристики.
Таблица 1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.