где Kp – коэффициент пропорциональности;
Ki – коэффициент интегрирования.
Пусть АФЧХ замкнутой системы имеет два комплексных корня характеристического уравнения Р1 и Р2, которые находятся в непосредственной близости от мнимой оси координат.
Эти корни и будут определять в основном всю динамику переходного процесса Р1,2 = -a ± jb. При оценке качества систем управления на основе косвенных методов была получена зависимость степени затухания ψ от ближайшего к мнимой оси корня, связанного с параметром m:
![]() , (3.3)
, (3.3)
где m – колебательность системы, которая соответствует отношению, m=a/b .
При m = 0 имеем границу области устойчивости. При расчетах промышленных систем регулирования чаще всего выбирают значение m от 0,22 (ψ = 0,75) до 0,367 (ψ = 0,9). Зададимся ψ = 0,9, тогда m = 0,3665.
Пусть в комплексной плоскости корней характеристического уравнения мнимая ось сдвинута до совпадения с корнем, местоположение которого характеризуется параметром m. Такому смещению мнимой оси соответствует подстановка частотной области
p = -mω ± jω. (3.4)
Исходя из условия «попадания» одного из корней на мнимую ось можно в соответствии с критерием Найквиста записать
Wp(-mω ± jω)∙Woб(-mω ± jω) = -1. (3.5)
Из выражения (3.3) можно получить два уравнения:
RepReoб -ImpImoб = -1; (3.6)
RepImoб + ImpReoб = 0, (3.7)
где Rep, Reoб - соответственно действительные части, Imp, Imoб - мнимые части расширенных частотных характеристик регулятора и объекта.
Выделим мнимую и действительную часть Wр:
Wр = - Kp - Ki/((j - m) ω) = mKi/((m2+1) ω) – Kp+jKi/((m2+1) ω). (3.8)
Выделим мнимую и действительную часть Wо:
Wо((j-m)ω)) = Re(Wо((j-m)ω)))+ jIm(Wо((j-m)ω))) = Reо +jImо (3.9)
Подставим в уравнения (3.6), (3.7) выражения из (3.8) и (3.9), получим:
(mKi/((m2+1) ω) – Kp)·Reо – Ki/((m2+1) ω)·Imо= –1 (3.10)
(mKi/((m2+1) ω) – Kp)·Imо + Ki/((m2+1) ω)·Reо = 0 (3.11)
Из полученной системы уравнений можно выразить коэффициенты Kp и Ki:
Kp = – (Imо ·m + Reо)/( Reо2 + Imо2); (3.12)
Ki = – (Imо ·ω·(m2+1))/( Reо2 + Imо2). (3.13)
Далее для произвольно заданных значений ω можно найти множество значений Kp и Ki, которые будут обеспечивать желаемую степень затухания переходного процесса. Имея массив коэффициентов, можно ввести дополнительные критерии качества регулирования для нахождения лучшей пары Kp и Ki. Ориентировочно можно выбирать значения из области параметров, когда произведение Kp·Ki стремится к максимуму.
Для расчета регулятора воспользуемся пакетом MATLAB.
В результате выполнения программы получим множество пар настроек, которые обеспечивают желаемую степень затухания переходного процесса ψ = 0,9. Это множество можно представить графически в виде зависимости Ki = f (Kp), представленной на рисунке 3.4, которая называется линией равной степени затухания.
В результате выполнения программы определяется пара значений Kp и Ki, для которых произведение Kp·Ki максимально. Получили Kp = 14,84; Ki = 0,261(точка помечена на графике знаком «+»).
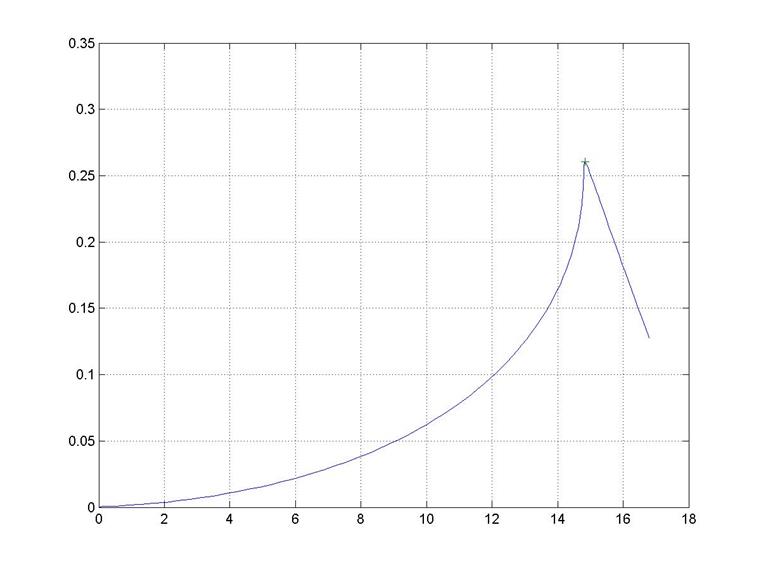
Рисунок 3.4 − Линия равной степени затухания ψ = 0,9 (Ki = f (Kp))
Для моделирования процесса регулирования воспользуемся приложением пакета MATLAB – Simulink. Схема системы регулирования представлена ранее на рисунке 3.3. Первоначально промоделируем систему без учета нелинейностей, для чего исключим из схемы нелинейные элементы. В результате моделирования получим переходную характеристику представленную на рисунке 3.5. и для регулируемой величины – на рисунке 3.6.
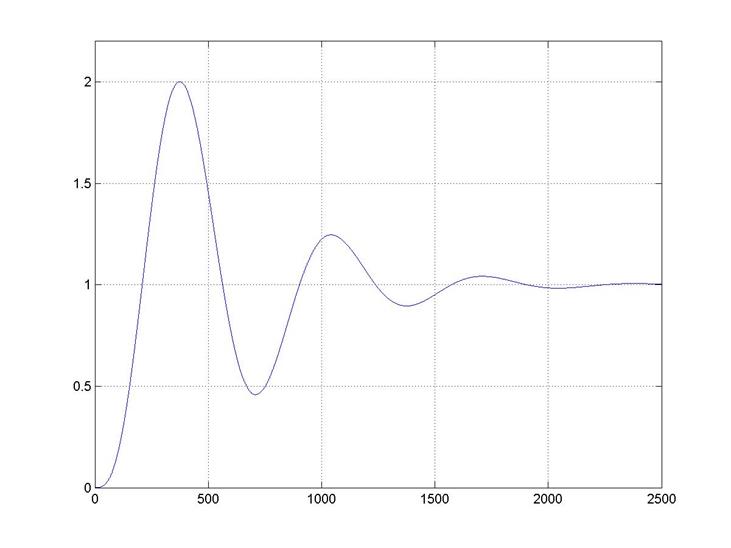
Рисунок 3.5 – Переходная характеристика каскадной системы регулирования (без учета нелинейностей)
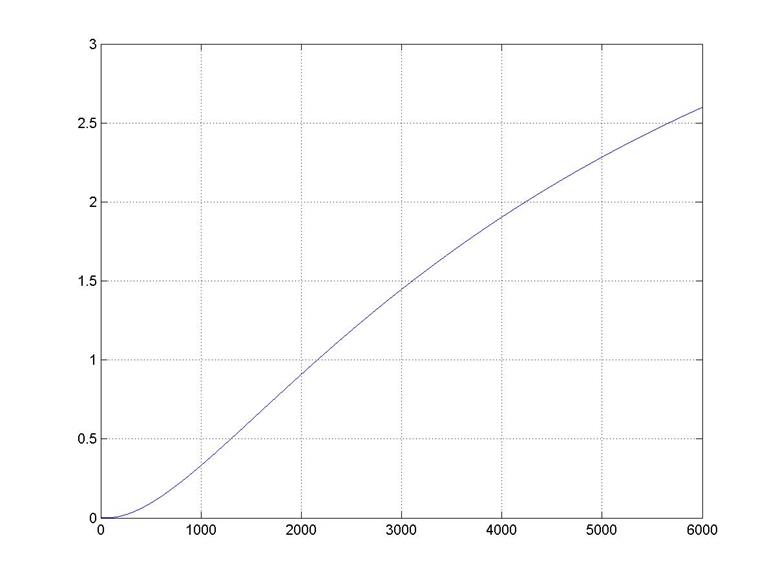
Рисунок 3.6 – Переходная характеристика каскадной системы регулирования (с учетом нелинейностей)
По рисункам 3.5 и 3.6 очевидно, что введение в систему реальных нелинейных элементов, а так же наличие динамической обратной связи (датчика) существенно изменяет качество регулирования. Для получения приемлемой переходной характеристики замкнутой системы введем поправку: будем снижать значения Кп и Ки.
Приемлемый переходный процесс представлен на рисунке 3.7, получен при настройках Kp = 4,5; Ki = 0,0009.
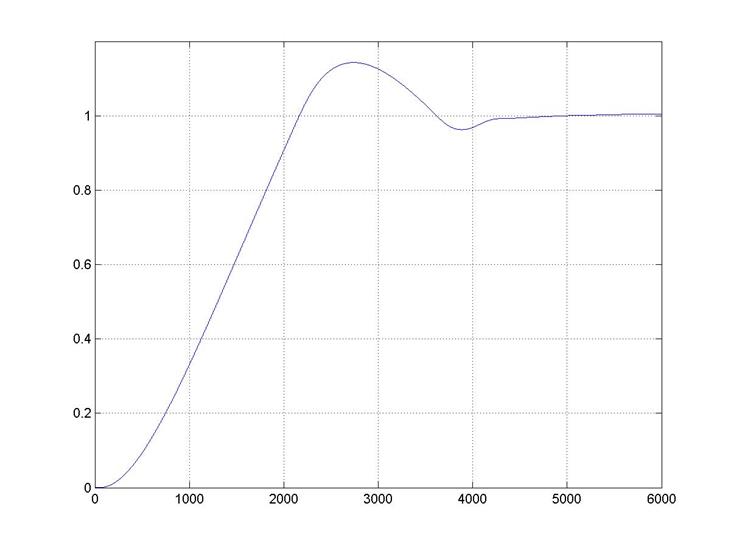
Рисунок 3.7 – Переходная характеристика скорректированной каскадной системы регулирования (с учетом нелинейностей)
Степень затухания переходного процесса:
ψ = (А1 – А2)/А1 = 1.
Перерегулирование:
δ = (hmax/hуст)·100% = (1,143/1)·100% = 14,3%
Время быстродействия (первое достижение желаемого значения):
tбыстр = 2164 с.
Время регулирования (достижение желаемого значения с допустимой ошибкой 3%):
tрег = 4018 с.
Измерим сигнал на выходе трехпозиционного релейного элемента (сигнал на закрытие/открытие клапана), представленный на рисунке 3.8; построим график изменения степени открытия клапана от времени, представленный на рисунке 3.9.
В результате моделирования убедились, что каскадная система имеет удовлетворительные показатели качества переходного процесса.
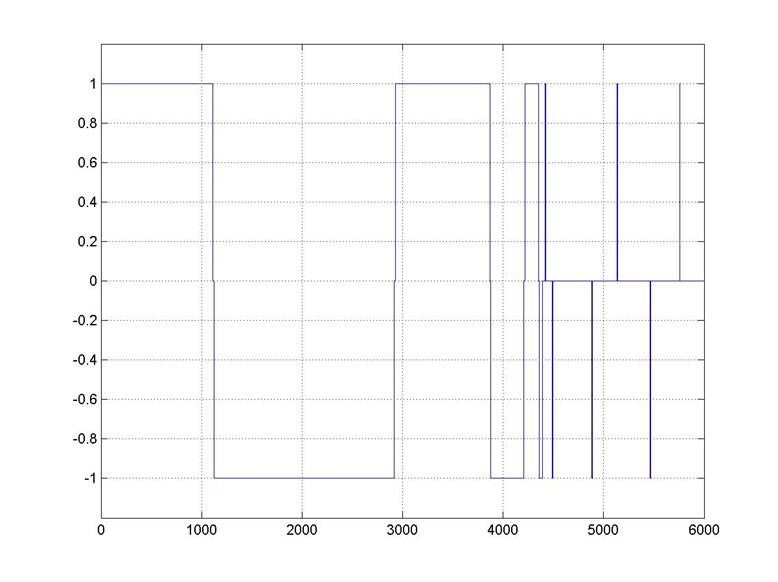
Рисунок 3.8 – Сигнал на выходе трехпозиционного релейного элемента скорректированной каскадной системы регулирования (с учетом нелинейностей)
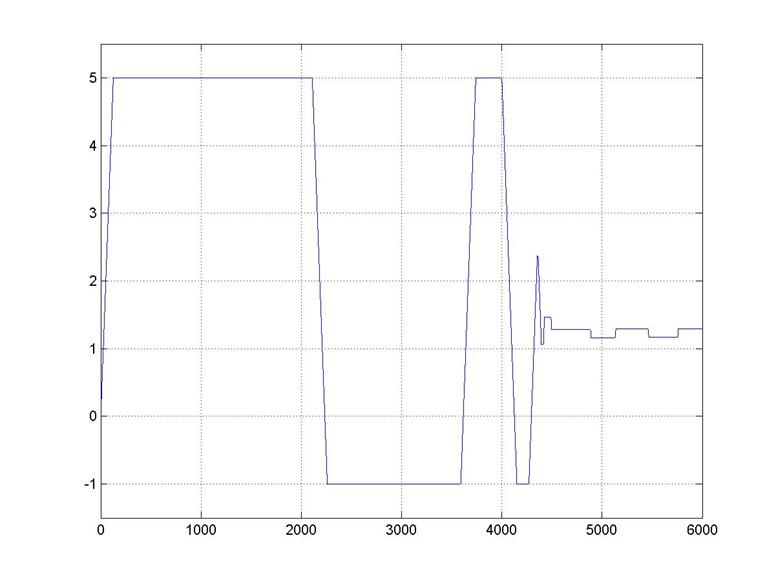
Рисунок 3.9 – Сигнал на выходе исполнительного механизма скорректированной каскадной системы регулирования (с учетом нелинейностей)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.