![]() (10.1)
(10.1)
Запас устойчивости по модулю для заданной системы в
дБ:  (10.2)
(10.2)
Запас устойчивости по фазе характеризует
удаление годографа от критической точки по дуге окружности единичного радиуса и
определяется углом ![]() между
отрицательным направлением вещественной полуоси и лучом, проведенным из начала
координат в точку пересечения годографа с единичной окружностью.
между
отрицательным направлением вещественной полуоси и лучом, проведенным из начала
координат в точку пересечения годографа с единичной окружностью.
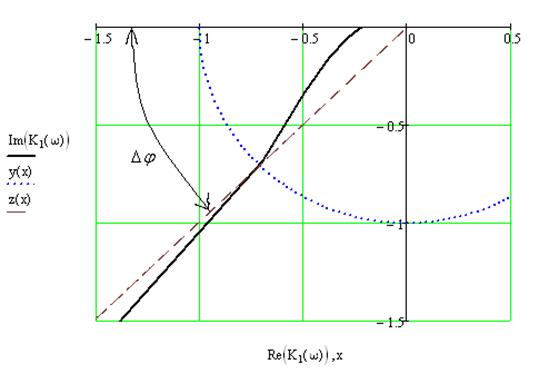
Рис. 10.2. Годограф Найквиста с указанием запаса устойчивости по фазе.
Для заданной системы запас устойчивости оказался
равным ![]() .
.
11. Определение ошибки регулирования системы.
Как было показано в пункте 2, передаточная функция
ошибки от регулирующего воздействия ![]() является
отношением двух характеристических полиномов: разомкнутой и замкнутой системы.
является
отношением двух характеристических полиномов: разомкнутой и замкнутой системы.
Отношение этих полиномов можно представить в виде некоего третьего полинома, так называемого полинома ошибки с пока что неизвестными коэффициентами:
 (11.1)
(11.1)
Коэффициенты полинома ![]() называются
коэффициентами ошибки.
называются
коэффициентами ошибки.
Формулу (11.1) можно записать в более удобном виде. Так как передаточная функция есть отношение изображений двух сигналов, то
 (11.2)
(11.2)
Записав это в одну строку, получим:
![]() (11.3)
(11.3)
или, переходя от операторной (символической) формы записи дифференциального уравнения к классической, получаем:
 (11.4)
(11.4)
Таким образом, если определить неизвестные пока
коэффициенты ошибки![]() , то искомая ошибка регулирования
записывается в аналитической форме через входной сигнал х(t) и его
производные.
, то искомая ошибка регулирования
записывается в аналитической форме через входной сигнал х(t) и его
производные.
Самый удобный способ определения коэффициентов
ошибки – выразить их через известные коэффициенты характеристических полиномов ![]() и
и ![]() .
.
Запишем эти полиномы в виде:
 (11.5)
(11.5)
Возвращаясь к формуле (11.1) и подставляя туда (11.5), путем деления двух полиномов легко найти коэффициенты третьего. В частности,


и так далее.
Для заданной системы (2.5):
 (11.6)
(11.6)

Наличие в системе двух интегрирующих звеньев
приводит к равенству нулю коэффициентов ![]() и
и ![]() , а, следовательно, и коэффициентов ошибки
, а, следовательно, и коэффициентов ошибки ![]() и
и ![]() .
.
Вычислим коэффициенты ![]() и
и ![]() :
:
 (11.7)
(11.7)
Входное воздействие представлено в виде:
![]()
Подставим выражение для входного воздействия в
формулу (11.4), учтя при этом равенство нулю коэффициентов ошибки ![]() и
и ![]() , а
также всех высших производных, начиная с четвертой:
, а
также всех высших производных, начиная с четвертой:
 (11.8)
(11.8)
 (11.9)
(11.9)
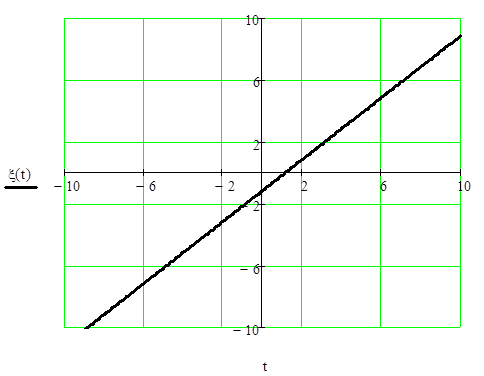 12. График
ошибки регулирования системы.
12. График
ошибки регулирования системы.
Рис. 12.1. График ошибки регулирования системы.
СПИСОК ЛИТЕРАТУРЫ
1. Радиоавтоматика. Методические указания к самостоятельной аудиторной работе/сост. Лявданский С.Е. – Новосибирск: Изд–во НГТУ, 1990. – 33 с.
2. Радиоавтоматика. Методические указания к самостоятельной аудиторной работе/сост. Лявданский С.Е. – Новосибирск: Изд–во НГТУ, 1995. – 35 с.
3. Радиоавтоматика. Под ред. В. А. Бесекерского. – М.: Высш. шк., 1985. – 271 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.