Из анализа данных таблицы 4 следует, что исследуемый механизм состоит из семи пар пятого класса. Следовательно, р5= 7 , а р4=0.
Из анализа таблиц 3 и 4 следует, что данный механизм образован одной сложной замкнутой кинематической цепью (т.к звено 2 входит в состав более двух кинематических пар, т. е. содержит три вершины звена и каждое звено которой входит в состав трех кинематических пар) и содержит в своей структуре три элемент стойки, представленный звеном 0.
Полученные значения подставляем в формулу (1.2), получим:
W=3∙5-2∙7-1∙0=15-14-0=1
Результат означает, что для описания взаимного расположения звеньев данного механизма на плоскости достаточно 1 обобщенной координаты.
Анализ состава структуры сложного плоского рычажного механизма.
Для выявления структурного состава механизма разбиваем рассматриваемую схему на структурные группы Ассура и определим класс, вид, подвижность и структурную формулу.
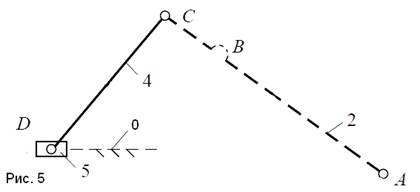 Группа звеньев 4-5 (рис.5). Данная группа состоит:
Группа звеньев 4-5 (рис.5). Данная группа состоит:
из двух подвижных звеньев: шатуна 4 и ползуна 5; двух поводков: шатуна 2 и направляющей (стойки) 0; трех кинематических пар: 4-5 вращательной пары пятого класса; 2-4 вращательной пары пятого класса; 5-0 поступательной пары пятого класса. Тогда n=2 , p5=3, а p 4=0 .
Подставляя данные значения в формулу (1.2), получим:
W=3∙2-2∙3-0=0
Результат означает, что группа звеньев 4 - 5 является структурной группой.
Класс структурной группы определяется числом подвижных звеньев и числом пар, исходя из данных значений n=2, p5=3, эта группа звеньев относится ко 2-му классу.
Порядок механизма определяется числом поводков, в данном случае их 2, значит, механизм обладает 2-м порядком.
Структурная формула составляется из первых букв названий кинематических пар, получаем ВВП, что соответствует 2-му виду.
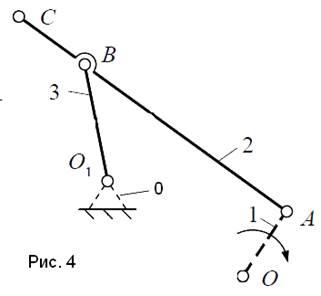 Группа
звеньев 2-3 (рис.4).
Группа
звеньев 2-3 (рис.4).
Данная группа состоит из двух подвижных звеньев: шатуна 2 и коромысла 3;
двух поводков: кривошипа 1 и стойки 0;
трех кинематических пар: 2-3 вращательной пары пятого класса; 1-2 вращательной пары пятого класса; 3-0 вращательной пары пятого класса. Тогда n=2,p5=3 , а p 4=0.
Подставив данные значения в формулу (1.2), получим:
W=3∙2-2∙3-0=0
Результат означает, что группа звеньев 2-3 является структурной группой.
Класс структурной группы определяется числом подвижных звеньев и числом пар, исходя из данных значений n=2, p5=3,эта группа звеньев относится ко 2-му классу.
Порядок механизма определяется числом поводков, в данном случае их 2, значит, механизм обладает 2-м порядком.
Структурная формула составляется из первых букв названий кинематических пар, получаем ВВВ, что соответствует 1-му виду.
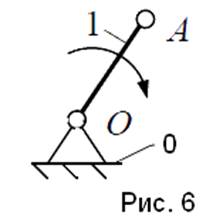
Группа звеньев 0-1 (рис.6).
Данная группа состоит из подвижного звена: кривошипа 1; шарнирно-неподвижной опоры: стойки 0; одной кинематической пары: 0-1 вращательная пара пятого класса.
Тогда n=1, p5=1 , а p4=0.
Подставляя данные значения в формулу (1.2), получим:
W=3∙1-2∙1-0=1
Результат означает, что для группы звеньев 0-1 существует одна обобщенная координата, следовательно, данная группа звеньев является первичным механизмом и его подвижность равна 1.
Из проведенного анализа следует, что число степеней свободы механизма равно 1; механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1 и две структурные группы 2-го класса 2-го порядка 2-го и 1-го видов.
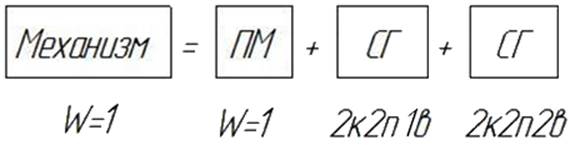
Класс и порядок механизма определяется классом и порядком наиболее сложной группы, входящей в его состав. Следовательно, данный механизм 2-го класса.
Проверка:
Для осуществления проверки сопоставим полученные значения с результатом, полученным при применении формулы Чебышева (1.2).
![]() (1.3)
(1.3)
![]() - подвижность механизма
- подвижность механизма
![]() - подвижность первичного механизма
- подвижность первичного механизма
![]() - подвижность структурной группы
- подвижность структурной группы
Полученные значения подставляя в формулу (1.3), получим:
W=1+0+0=1
Таким образом, мы получили, что результат сходиться с данными полученными при расчете по формуле (1.2), из чего следует что решение задачи выполнено правильно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.