Тема 7
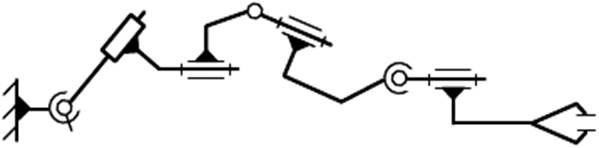
Структурная схема пространственного механизма
Структурная схема плоского механизма
Вариант 5
Дано:
lОA =0,058
м, lAB = 0,233 м, ![]() = 0,105 м, lBC =
0,035 м, lCD = 0,325 м, a = 0,14 м, b =
0,203 м, l
= 0,105 м, lBC =
0,035 м, lCD = 0,325 м, a = 0,14 м, b =
0,203 м, l![]() = 0,2 м,
= 0,2 м,![]() =0,052 м, l
=0,052 м, l![]() = 0,075 м, n1 = 280 мин-1, Pпс = 520 Н.
= 0,075 м, n1 = 280 мин-1, Pпс = 520 Н.
1. Структурный анализ схем пространственного и сложного плоского рычажных механизмов.
1.1 Определение подвижности (степени подвижности) и маневренности пространственного рычажного механизма.
1.2 Определение подвижности (степени подвижности) и анализ состава структуры сложного плоского рычажного механизма .
2. Метрический синтез кинематической схемы сложного плоского рычажного механизма по заданным параметрам. 2.1 Выбор масштабного коэффициента, перевод заданных параметров в выбранный масштабный коэффициент.
2.2 Определение крайних (граничных) положений типового механизма лежащего в основе структуры сложного плоского рычажного механизма. Выбор начального (нулевого) положения механизма.
2.3 Построение плана положений сложного плоского рычажного механизма.
3. Кинематический анализ плоского рычажного механизма.
3.1 Выбор характерных точек механизма.
3.2 Составление векторных уравнений распределения величин скоростей между характерными точками механизма.
3.3 Построение планов скоростей относительно 12(13)-ти положений кривошипа соответствующих одному циклу работы механизма.
3.4 Определение значений и направления действия угловых скоростей всех звеньев.
3.5 Составление векторных уравнений распределения величин ускорений между характерными точками механизма.
3.6 Построение планов ускорений относительно 12(13)-ти положений кривошипа соответствующих одному циклу работы механизма.
3.7 Определение значений и направлений действия угловых ускорений всех звеньев.
4. Кинематический (силовой) анализ сложного плоского рычажного механизма.
4.1 Составление расчетной схемы; определение величин, линий и направлений действия сил тяжести, сил и моментов пар сил инерции.
4.2 Синтез динамический (силовой) модели.
4.3 Определение уравновешивающей силы с помощью теоремы И. Е. Жуковского.
4.4 Метод кинетостатики для одного положения кривошипа; силовой анализ структуры групп и первичного механизма (приведение сил). Определение величины уравновешивающей силы и уравновешивающего момента пары сил.
4.5 Определение погрешности выполненного анализа.
5. Структурный анализ схем пространственного и сложного плоского рычажных механизмов.
5.1 Определение подвижности (степени подвижности) и маневренности пространственного рычажного механизма.
Определение подвижности:
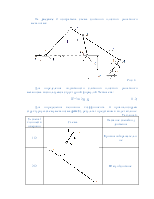
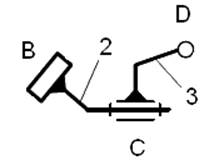
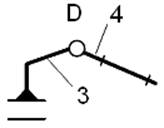
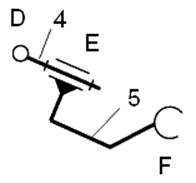
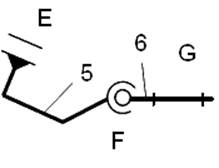
На (рис.1) изображена структурная схема не замкнутого пространственного механизма:
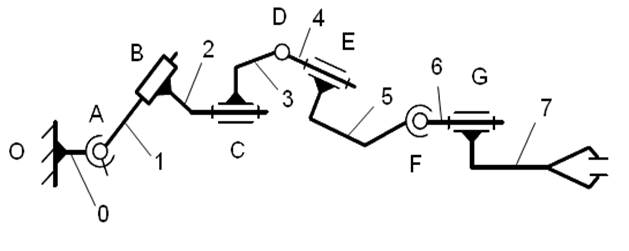
Рис. 1
Для определения подвижности (степени подвижности) механизма, воспользуемся структурной формулой Сомова-Малышева:
W = 6 n - 5 p5- 4 p4- 3 p3- 2 p2- p1(1.0)
W–степень подвижности механизма
n – число подвижных звеньев
p – число кинематических пар соответствующего класса
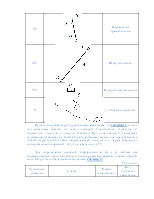
Для определения величины коэффициента n проанализируем структурную схему механизма (рис.1), результат представим в виде таблицы:
Таблица 1.
|
№ звена |
Схема |
Кинематическое состояние |
|
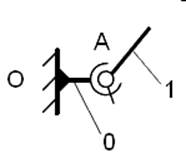
0-стойка |
|
Неподвижное/неподвижная сферическая опора |
|
1 |
|
Подвижное |
|
2 |
|
Подвижное |
|
3 |
|
Подвижное |
|
4 |
|
Подвижное |
|
5 |
|
Подвижное |
|
6 |
|
Подвижное |
|
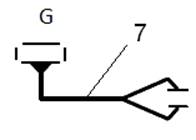
7-схват |
|
Подвижное |
Проанализировав структурную схему механизма, из таблицы 1 видно, что механизм состоит из восьми звеньев. При этом звенья 1-7 являются подвижными, а стойка 0 – неподвижным звеном, представленным в виде сферической опоры. Следовательно, n=7 .
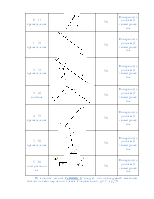
Для определения значений коэффициентов p5, p4, p3, p2, p1 найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследования заносим в таблицу 2:
Таблица 2.
|
№ звеньев/ движение |
Схема |
Класс/ подвижность |
Вид контакта/ замыкание |
|
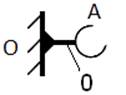
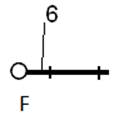
0 - 1 Сферическое с пальцем |
|
4/2 |
Поверхность (низшая)/ геометрическое |
|
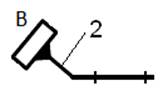
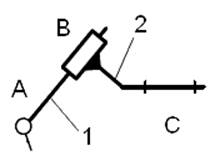
1 – 2 Поступательное |
|
5/1 |
Поверхность (низшая)/ Геометрическое |
|
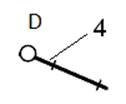
2 – 3 Вращательное |
|
5/1 |
Поверхность (низшая)/ Геометрическое |
|
3 – 4 Вращательное |
|
5/1 |
Поверхность (низшая)/ Геометрическое |
|
4 – 5 Вращательное |
|
5/1 |
Поверхность (низшая)/ Геометрическое |
|
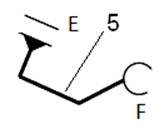
5 – 6 Сферическое |
|
3/3 |
Поверхность (низшая)/ Геометрическое |
|
6 – 7 вращательное |
|
5/1 |
Поверхность (низшая)/ геометрическое |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.