![]() (1.12)
(1.12)
Решение.
Заметим, что система фазовых ограничений (1.11) совпадает с системой (1.9). Поэтому область допустимых решений D. будет той же самой, что и в примере 2.
Построим вектор-градиент ![]() из
начала координат. Проведем линию перпендикулярно вектору
из
начала координат. Проведем линию перпендикулярно вектору ![]() . Линия F1, проходящая
через начало координат, соответствует значению 1, поскольку
. Линия F1, проходящая
через начало координат, соответствует значению 1, поскольку ![]() . Мысленно сдвинем линию уровня в
направлении вектора
. Мысленно сдвинем линию уровня в
направлении вектора ![]() . Первое касание
многоугольника соответствует положению F3 . Эта линия является
опорной, и ей соответствует минимальное значение, которое достигается на
множестве допустимых решений. Продолжим движение линии уровня до выхода из
множества D,. этому положению соответствует положение F8
. Заметим, что линия уровня параллельна стороне MN , поэтому
решением является множество точек лежащих между крайними точками M
и N, Точка M является точкой пересечения прямых y3
и y4, ее координаты можно определить как решение линейной
системы.
. Первое касание
многоугольника соответствует положению F3 . Эта линия является
опорной, и ей соответствует минимальное значение, которое достигается на
множестве допустимых решений. Продолжим движение линии уровня до выхода из
множества D,. этому положению соответствует положение F8
. Заметим, что линия уровня параллельна стороне MN , поэтому
решением является множество точек лежащих между крайними точками M
и N, Точка M является точкой пересечения прямых y3
и y4, ее координаты можно определить как решение линейной
системы.

Ее решение x1=4, x2=2, и этой точке соответствует искомое максимальное значение линейной функции
![]() .
.
Таким образом, Fmax=9, при x1=4, x2=2
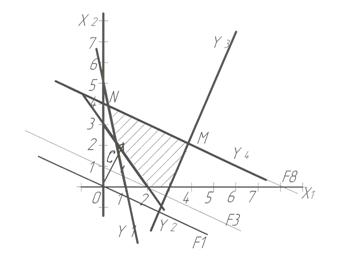
Рис.1.2
Точка N является точкой пересечения прямых y1 и y4, ее координаты можно определить как решение линейной системы
![]()
Ее решение x1=2/9, x2=35/9,
и этой точке соответствует искомое максимальное значение линейной функции ![]() . Таким образом, значение в точке N
совпадает со значением в точке M. Fmax=9,
при x1=2/9, x2=35/9.
. Таким образом, значение в точке N
совпадает со значением в точке M. Fmax=9,
при x1=2/9, x2=35/9.
Координаты всех точек, лежащих между M и N можно записать в виде
![]()
Значение функции во всех этих точках равно 9.
Вывод. В данном случае линейная функция достигает своего максимального значения во всех точках ребра MN множества решений D.
ПРИМЕР 4
Решить графически задачу ЛП (1.13)-(1.15).
![]() (1.13)
(1.13)
 (1.14)
(1.14)
![]() (1.15)
(1.15)
Решение.
Построим область допустимых решений D (Рис.1.3).
Построение области аналогично примеру 2, но в этом построении отсутствует прямая y4.
Пересечение трех полуплоскостей определяют неограниченную область допустимых решений D.
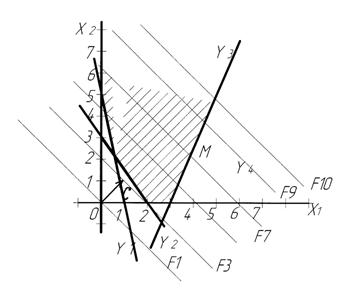
Рис. 1.3
Построим вектор-градиент ![]() из
начала координат. Проведем линию перпендикулярно вектору-
из
начала координат. Проведем линию перпендикулярно вектору-![]() . Линия F1, проходящая
через начало координат, соответствует значению 1, поскольку
. Линия F1, проходящая
через начало координат, соответствует значению 1, поскольку ![]() . Мысленно сдвинем линию уровня в
направлении вектора
. Мысленно сдвинем линию уровня в
направлении вектора ![]() . Первое касание
многоугольника соответствует положению F3 . Эта линия является опорной,
и ей соответствует минимальное значение , которое достигается на множестве
допустимых решений. Заметим, что многогранник незамкнут в направлении роста
целевой функции, поэтому целевая функция не имеет максимума, поскольку для
любой линии уровня найдется другая линия уровня, лежащая в направлении вектора
. Первое касание
многоугольника соответствует положению F3 . Эта линия является опорной,
и ей соответствует минимальное значение , которое достигается на множестве
допустимых решений. Заметим, что многогранник незамкнут в направлении роста
целевой функции, поэтому целевая функция не имеет максимума, поскольку для
любой линии уровня найдется другая линия уровня, лежащая в направлении вектора ![]() , которой соответствует большее
значение функции.
, которой соответствует большее
значение функции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.