0 w1 w0 w2 w
Z1
Z2
a
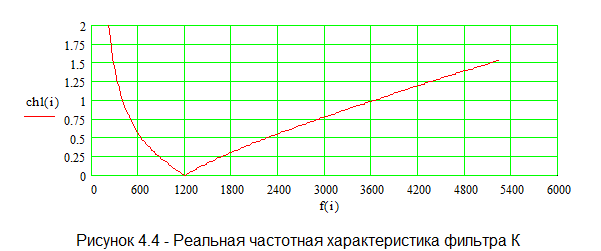
Рисунок 4.3 –Частотные зависимости фильтра типа К.
Номиналы элементов фильтра можно найти из следующей формулы:

w0=7566 рад/с.
Принимаем: L1=10-4 Гн, L2=1.8*10-4 Гн,
 |
Зависимость ch(a/2) от частоты для фильтра с такими параметрами приведена на рисунк 4.4.
 |
 а, дБ
а, дБ
17,4
0
500 2900 f, Гц.
Рисунок 4.5 - Зависимость затухания от частоты.
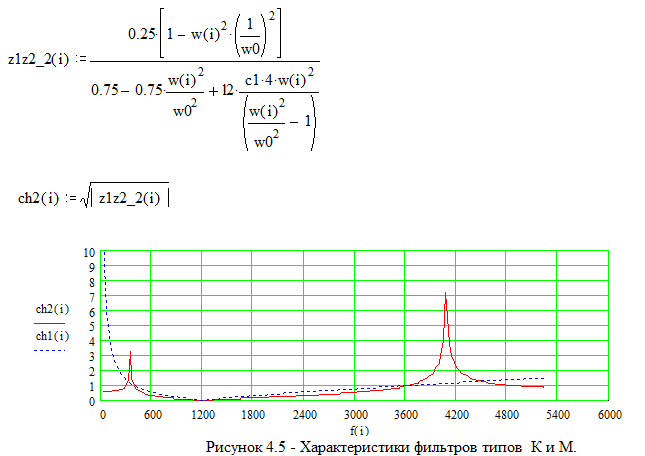 |
Зависимость затухания от частоты для фильтра типа М изображена на рисунке 4.7. Она построена на основе данных графика, показанного на рисунке 4.6.
![]() а, дБ
а, дБ
![]()
![]()
 45
45
 |
![]() 30
30
15
0 500 2900 4100 f, Гц
Рисунок 4.7- Зависимость затухания от частоты.
Как видно из графика, после второго резонанса значение ch(а/2) существенно снижается, что является недостатком фильтра М. При последовательном соединении обоих фильтров этот недостаток практически исчезает. Важным параметром полосового фильтра является минимальное значение затухания в полосе частот выше второго резонанса, в нашем случае выше 4200 Гц. Значение частоты для минимума затухания возьмем из графика на рисунке 4.6, а значение ch(а/2) для одного фильтра – из графика на рисунке 4.4.
fМИН=4500 Гц;
ch(a/2)=1.3.
a»1.52 Нп=13.22 дБ.
Для двух последовательно соединенных фильтров затухание составит 13.22*2=26.44 дБ. Такое значение является слишком малым, поэтому необходимо подключить дополнительно еще один фильтр типа К. При этом суммарное затухание составит 13.22*3=39.66 дБ.
Таким образом, фильтр приема состоит из последовательного соединения двух фильтров типа К и одного фильтра типа М.
В курсовом проекте была проведена разработка системы передачи дискретной информации. Основное внимание было уделено построению главных устройств системы: модулятора и демодулятора, кодера и декодера. Было установлено, что применение циклических кодов с исправлением ошибок в системе связи с данными параметрами позволит снизить вероятность приема сообщения с ошибкой в 28570 раз.
Кроме того, были рассчитаны параметры элементов мостового полосопропускающего фильтра, устанавливаемого на приемной стороне и определено минимальное значение затухания в полосе задержки..
1) Кудрешов В. А., Семенюта Н. Ф. Передача дискретной информации на железнодорожном транспорте. М.: Транспорт, 1986.
2) Многоканальная связь на железнодорожном транспорте. М.: Транспорт, 1992
3) Каллер М. Я., Фомин А. Ф. Теоретические основы транспортной связи. М. Транспорт, 1989.
4) Семенюта Н. Ф., Павлович Н. В. Исследование каналообразующей аппаратуры с частотной модуляцией. Гомель, 1999.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.