А` (х)=1000111=х6+х2+х+1
![]()
![]() х6+х2+х+1
х4+х2+х+1
х6+х2+х+1
х4+х2+х+1
х6+х4+х3+х2 х2+1
![]()
![]() х4+х3+х+1
х4+х3+х+1
х4+х2+х+1
х3+х2
остаток х3+х2=1100
Таблица 3 – Порядок изменения содержимого регистра RG2.
|
Номер такта |
Содержимое регистра RG2 |
Код |
||||
|
1 |
2 |
3 |
4 |
|||
|
7 |
0 |
0 |
1 |
1 |
1100 |
х3+х2 |
|
8 |
1 |
1 |
1 |
1 |
1111 |
х3+х2+х+1 |
|
9 |
1 |
0 |
0 |
1 |
1001 |
х3+1 |
|
10 |
1 |
0 |
1 |
0 |
0101 |
х2+1 |
Как видно из таблицы, опознаватель №2 сработает после десятого такта, при этом в двух старших разрядах регистра RG1 будут биты, принятые с ошибкой.
Если известно, что велика вероятность других видов двойных ошибок, то в схему декодера необходимо добавить дополнительные опознаватели.
Теперь определим, какое снижение вероятности ошибки мы получили за счет кодирования информации. По условию, вероятность появления одной ошибки p составляет 10-3. Так как вероятность двойных и др. ошибок существенно ниже, можно принять, что общая вероятность приема ошибочной комбинации 10-3.
После установки декодера с исправлением одиночных ошибок наибольшая вероятность приходится на двойные ошибки:
![]()
 .
.
Далее, если установить опознаватель смежных двойных ошибок, наиболее вероятными станут двойные несмежные ошибки:
![]() .
.
Если в схему декодера добавить опознаватели несмежных двойных ошибок, то вероятность неправильного приема будет определятся тройными ошибками:
 .
.
Таким образом, при исправлении одиночных и двойных ошибок мы получили снижение вероятности принятия ошибочной комбинации в 28570 раз при снижении скорости передачи в 2.333 раза.
Рассчитанная вероятность ошибочного приема является достаточно низкой, что позволяет использовать систему прямой передачи данных.
Фильтр приема должен пропускать частоты спектра полезного сигнала и подавлять другие частоты. Так как спектр полезного сигнала считается ограниченным и он не начинается от нуля и не уходит в бесконечность, фильтр приема представляет собой полосовой фильтр.
Как правило, для получения хороших характеристик в качестве фильтра в устройствах связи используют последовательное соединение фильтров типа К и типа М. Фильтры тика К имеют небольшое количество элементов и простую схему, но обладают существенным недостатком – малая крутизна характеристики затухания в полосе задержки. Этот недостаток исправляется путем подключения дополнительного фильтра типа М. Схемы ППФ типа К и параллельно-производного ППФ типа М с коэффициентом m=0.5 изображены на рисунках 4.1 и 4.2.
0,5 L1 2C1
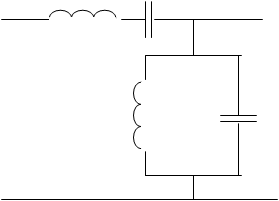 |
2 L2 0?5 C2
Рисунок 4.1 – Схема фильтра типа К.
0,25 L1 4 C1
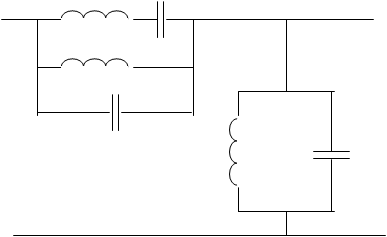 |
1.33 L2
0.75 C2
4 L2 0.25 C2
Рисунок 4.2 – Схема фильтра типа М.
Для приведенных фильтров величина затухания определяется по следующей формуле:
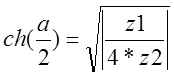 , где
, где
z1, z2 - сопротивления соответственно продольного и поперечного плеч фильтра.
Схематическая зависимость сопротивления и затухания фильтра К от частоты приведена на рисунке 4.3. Реальная полоса пропускания фильтра расположена на отрезке частот 700-2700 Гц (см. подраздел 3.2). Добавив по 200 Гц «запаса» из-за отличного от нуля затухания на границе полосы пропускания и возможных отклонений параметров фильтра, мы получим полосу 500-2900 Гц:
w1=500*2p Гц;
w2=2900*2p Гц.
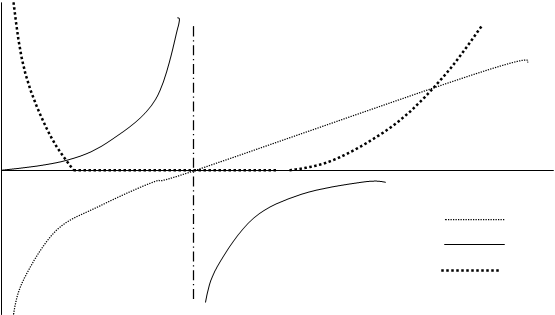 Z,
a
Z,
a
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.