
где a(р) – гурвицев полином, р=d/dt. Тогда при m= 0 имеем
![]()
Если m обращается в ноль, то изменяется структура системы (1.3),(1.4). Поэтому используется термин «структурные возмущения». Но из-за того, что меняется порядок системы, такие возмущения называют также сингулярными, а система (1.3), (1.4) – сингулярно возмущенной.
2. Задача синтеза непрерывных адаптивных систем
2.1 Постановка задачи адаптивного управления
Динамическая система, состоянием которой требуется управлять, описывается уравнениями состояния
 (2.1)
(2.1)
где хÎRn , yÎRl , uÎRm , θÎRs - векторы переменных состояния, выходных переменных, управляющих воздействий, параметрических возмущений (рисунок 2.1).
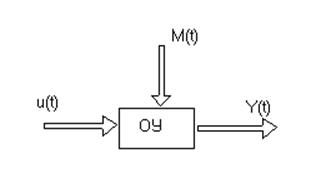
Рисунок 2.1
В уравнении (2.1) помимо объекта управления могут входить математические модели исполнительных, измерительных устройств. Вектор – функции f, G предполагаются известными, но зависимость f и G от параметра времени t отражает некоторую неопределённость по параметрам и внешним условиям. В реальных условиях параметрические и аддитивные возмущения ограничены, поэтому учитывается ограничение на уровень возмущений
 (2.2)
(2.2)
В простейшем случае цель управления задаётся в виде неравенства
![]() , (2.3)
, (2.3)
гдеQ – целевая функция, δq – допустимое значение целевой функции.
Желаемое поведение системы может быть задано с помощью эталонной модели
 (2.4)
(2.4)
гдеxмÎRn – вектор состояния модели, yмÎRl – вектор выходных переменных модели.
Задача синтеза адаптивной системы управления состоит в определении алгоритма управления
![]() (2.5)
(2.5)
и алгоритма адаптации
![]() (2.6)
(2.6)
которые
обеспечивают достижение поставленной цели (1.7) в системе (2.1), (2.4)-(2.6)
для любых возмущений из ограниченного множества (![]() ), где Wq-
ограниченная область значений q, в которой
выполняется неравенство (2.2). В уравнениях (2.5), (2.6) ut, kt – некоторые
операторы.
), где Wq-
ограниченная область значений q, в которой
выполняется неравенство (2.2). В уравнениях (2.5), (2.6) ut, kt – некоторые
операторы.
Система (2.1), (2.4) - (2.6) называется адаптивной в классе Wq по отношению к цели (2.3), если для любого qÎWqи при любых начальных условиях x(0), u(0), k(0) выполняется неравенство (2.3).
2.2 Этапы синтеза адаптивной системы
Адаптивная система (2.1), (2.5), (2.6) имеет двухуровневую схему, поэтому выделяют два основных этапа расчета:
1) синтез основного контура (2.5),
2) синтез контура адоптации (2.6).
К методам синтеза основного контура, получившим наибольшее распространение, относятся:
1) метод эталонного уравнения (или метод инвариантности). Уравнение закона управления получается из равенства правых частей уравнений эталонной модели и модели объекта управления;
2) метод модального управления. Закон управления определяется, исходя из желаемых показателей качества переходного процесса;
3) методы оптимального управления. Закон управления получается в результате решения задачи оптимизации по управляющему воздействию некоторого обобщённого показателя качества;
4) метод сингулярных возмущений. Для синтеза закона управления используется упрощённая модель системы, которая получается в результате выделения подсистем быстрых и медленных процессов. Закон управления определяется по модели, описывающей подсистему медленных движений.
В результате применения одного из перечисленных методов получают «идеальный» закон управления. Как правило, вид уравнения основного контура следующий
![]()
где kх,, kr – матрицы коэффициентов соответствующих размерностей.
Второй этап синтеза сводится к определению оператора kt (2.6). Алгоритм настройки коэффициентов регулятора может быть определен
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.