Беспоисковые системы с информацией о временных характеристиках (ВХ) – это системы, в которых сравниваются некоторые ВХ модели и системы, например, импульсные функции, частоты собственных колебаний, коэффициенты демпфирования и т. д. В этих системах модель как физическое звено также может отсутствовать. (Солодовников В.В., Петров Б.Н. и др.)
К беспоисковым системам с моделью относятся системы, в которых сравниваются реакции модели и системы на одно и тоже входное воздействие, коэффициенты перестраиваются на основании рассогласования этих реакций (Прокопов Б.Н., Розенвассер Е.Н., Юсупов Р.М. и др.)
Беспоисковые системы с моделью принято делить на системы прямого и непрямого адаптивного управления. Термин «прямое адаптивное управление» впервые появился в работах Narenda K.C., Valavani L.S. (конец 70-х годов). Перестройка параметров в системах прямого адаптивного управления может осуществляться непосредственно по рассогласованию динамических характеристик модели и системы без предварительной идентификации объекта, т. е. параметры регулятора меняются до тех пор, пока система не станет в некотором смысле эквивалентной модели.
В системах непрямого адаптивного управления сначала проводят идентификацию объекта, а затем, зная желаемые динамические свойства замкнутой системы, выставляют соответствующие коэффициенты регулятора.
1. При прямом адаптивном управлении контуры самонастройки работают по замкнутому циклу. В этом случае в системе могут парироваться и изменятся параметры самого регулятора (например, с течением времени может измениться крутизна характеристик датчиков, добротность приводов и т. д). Однако каждый контур самонастройки повышает порядок общей системы и дифференциальных уравнений как минимум на единицу. Контур самонастройки (адаптации) влияет на общую динамику системы. Поэтому для каждого класса систем актуален вопрос устойчивости. Системы обладают хорошим быстродействием контуров адаптации.
2. В системах непрямого адаптивного управления контуры адаптации работают по разомкнутому циклу и, следовательно, не влияют на динамику системы. Однако, все ошибки идентификации, уходы параметров отдельных блоков регулятора, ошибки работы самих контуров адаптации существенно влияют на точность управления. В этом классе систем требования к модели значительно жёстче, чем в случае систем прямого адаптивного управления, когда модель может быть упрощённой (иметь более низкий порядок по сравнению с порядком системы) (таблица 1.1).
Следует также отметить, что между прямым и непрямым адаптивным управлением существует тесная связь.
Таблица 1.1
|
№ |
Свойства |
Системы прямого адаптивного управления |
Системы непрямого адаптивного управления |
|
1 |
Порядок замкнутой системы |
Выше (-) |
Ниже (+) |
|
2 |
Устойчивость |
Требует дополнительных исследований (-) |
Не требует дополнитель- ных исследований (+) |
|
3 |
Тип контура адаптации |
замкнутый |
разомкнутый |
|
4 |
Точность работы системы |
Выше (+) |
Ниже (-) |
|
5 |
Быстродействие контура адаптации |
Выше (+) |
Ниже (-) |
|
6 |
Требования к модели |
Ниже (+) |
Выше (-) |
На рисунках 1.2 и 1.3 приведены структуры беспоисковых систем адаптивного управления.
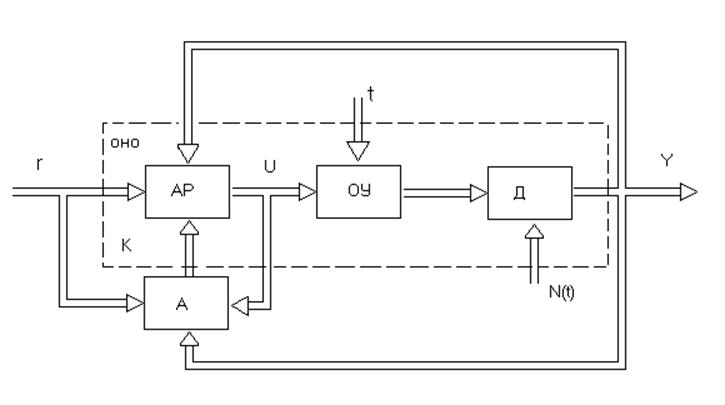
Рисунок 1.2
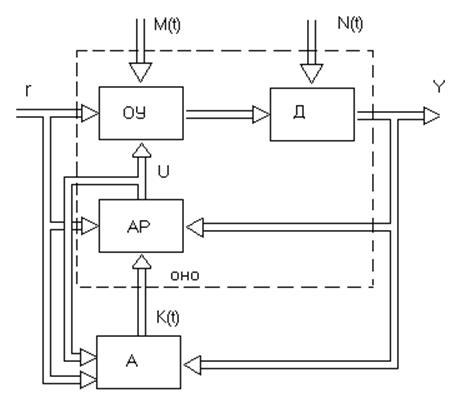
Рисунок 1.3
Использованы следующие названия блоков: ОУ – объект управления, Д – датчики, АР – адаптивный регулятор, А – адаптор; и обозначения переменных (сигналов):
r – вектор входных (эталонных) переменных системы,
Y – вектор выходных переменных системы,
U – вектор управляющих воздействий,
M – вектор внешних возмущений,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.