В КНС обычно удается достичь большого положительного эффекта при объединении радиотехнических и нерадиотехнических измерителей. Это обусловлено прежде всего тем, что ошибки радиотехнических измерителей и нерадиотехнических измерителей обладают статистическими характеристиками, сильно отличающимися друг от друга, что во многом определяет выигрыш от комплексирования.
Достоинства радиотехнических измерителей:
· высокая точность измерения навигационных параметров, практически не зависящую от времени их работы (полета);
· слабая зависимость функционирования для большинства диапазонов частот от метеоусловий, времени года и суток.
Недостатками данных измерителей являются:
· ограниченная для многих радионавигационных устройств и систем дальность действия;
· подверженность действию радиопомех; ограниченная пропускная способность для некоторых типов измерителей.
Среди достоинств нерадиотехнических измерителей следует отметить:
· неограниченную дальность действия;
· независимость функционирования от помех для многих типов измерителей данного типа и скрытность работы.
Недостаток нерадиотехнических измерителей:
· малая точность измерения навигационных параметров, которая ухудшается с увеличением времени работы измерителя.
В результате комплексирования могут решаться задачи различной степени сложности:
1) выбор наиболее эффективного в данный момент навигационного средства из имеющихся;
2) компенсация недостатков одного из навигационных средств за счет другого;
3) оптимальное использование совокупной навигационной информации.
Решение второй задачи эффективно проводится в настоящее время при использовании вычислительных средств. Так навигационная система крылатых ракет США «Терком» обеспечивает компенсацию недостатков инерциальной системы навигации за счет обзорно-сравнительного метода навигации.
Структурная схема простейшей комплексной системы. Такая система (рис. 2.2) основана на инвариантном (независимом) относительно W алгоритме обработки сигналов двух измерителей 1 и 2. Предполагается, что сигналы на выходах измерителей пропорциональны W (коэффициент пропорциональности принят равным единице). Помехи Wшl и Wш2 на выходах измерителей считаются стационарными независимыми случайными процессами.
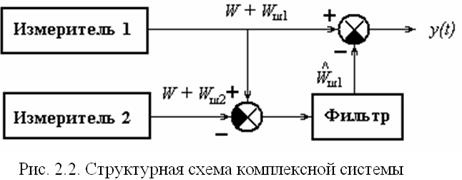
Основной элемент рассматриваемой системы (Фильтр) должен подавлять
составляющие спектра G2(w) помехи Wш2 и беспрепятственно пропускать
помехи Wш1 со спектром G1(w). Выделяемая на выходе фильтра помеха ![]() ш1 компенсирует в вычитающем
устройстве Wшl, чем достигается минимум флуктуационной погрешности. Поэтому
данная схема называется схемой компенсации.
ш1 компенсирует в вычитающем
устройстве Wшl, чем достигается минимум флуктуационной погрешности. Поэтому
данная схема называется схемой компенсации.
Вводя передаточную функцию фильтра Кф(р) и переходя в область комплексной переменной р, т.е. применяя преобразование Лапласа, можно записать процесс y(t) на выходе схемы компенсации в виде
y(p) = W(p)+Wш2(p)Kф(p)+Wшl(p)[1-Кф(p)] = W(p)+Wш(p).
Составляющая Wш(p) этого процесса приводит к флуктуационной погрешности измерения sфл, дисперсия которой может быть найдена из соотношения
 ,(2.2)
,(2.2)
где ![]() – комплексный коэффициент передачи
фильтра, получаемый заменой р на jw в выражении для Кф(р).
– комплексный коэффициент передачи
фильтра, получаемый заменой р на jw в выражении для Кф(р).
Наименьшего значения флуктуационная погрешность достигает при минимуме подынтегрального выражения А(w). Минимуму А(w) соответствует оптимальный коэффициент передачи фильтра
 . (2.3)
. (2.3)
При Кф=Кф опт флуктуационная погрешность определяется формулой
 . (2.4)
. (2.4)
Из (2.3) следует, что результирующая флуктуационная погрешность комплексной системы всегда меньше флуктуационной погрешности каждого измерителя, определяемой спектром G1(w) или G2(w). В частном случае, когда спектры G1(w) и G2(w) не перекрываются, sфл = 0. Спектры G1(w) и G2(w) лучше различаются (а следовательно, легче выделяется помеха Wш1), если в качестве измерителя 1 используется механический датчик (обычно инерциальная навигационная система), а в качестве измерителя 2 – радиотехнический измеритель.
Таким образом, комплексная система приобретает свойство инвариантности к изменению W, но ценой информационной избыточности системы. Дополнительное достоинство комплексирования – повышение надежности. Отказ одного из измерителей приводит к снижению точности, а не к потере информации о навигационном элементе W.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.