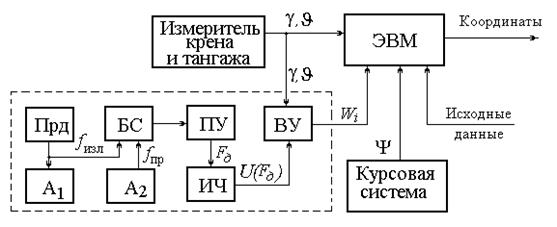
Рис. 2.16. Обобщенная структурная схема доплеровской навигационной системы
Сигнал U(Fд), содержащий информацию
о Fд, поступает
в вычислитель ВУ, где определяются составляющие вектора ![]() или
другие необходимые навигационные элементы.
или
другие необходимые навигационные элементы.
В ДИС с попарной обработкой сигналов в ВУ
поступает информация об углах крена gи тангажа J для уменьшения ошибок определения
составляющих вектора скорости ![]() , вызванных изменением
форм спектров доплеровских сигналов. При больших углах крена (g > 5…6°) и тангажа (J > 10°) ДИС с попарной обработкой сигналов отключается
и навигационная система работает в режиме памяти, когда в качестве текущего
значения скорости в системе счисления используется последнее значение путевой
скорости полученной перед отключением ДИС.
, вызванных изменением
форм спектров доплеровских сигналов. При больших углах крена (g > 5…6°) и тангажа (J > 10°) ДИС с попарной обработкой сигналов отключается
и навигационная система работает в режиме памяти, когда в качестве текущего
значения скорости в системе счисления используется последнее значение путевой
скорости полученной перед отключением ДИС.
Зондирующий сигнал. Оптимальный с точки зрения точности и энергетических затрат, сигнал представляет собой непрерывные немодулированные колебания. Такой сигнал обеспечивает однозначность и максимальную точность измерения Fд. Повышению точности способствуют и малые потери энергии сигнала, которая сосредоточена в узкой области частот, примыкающей к Fд, а не распределена по составляющим, соответствующим гармоникам модулирующего колебания.
Отраженный сигнал. Действующий на входе приемника ДИС сигнал из-за конечной ширины ДНА представляет собой сумму сигналов, отраженных от элементарных отражателей, находящихся в пределах облучаемого участка ОУ земной поверхности. Очевидно, что соответствующие i-м элементарным отражателям, расположенным под углами gi, сигналы имеют различные доплеровские сдвиги частоты. Поэтому отраженный сигнал содержит все частоты Fдi соответствующие углам gi в пределах ДНА. Начальные фазы i-x сигналов носят случайный характер, следовательно, отраженный сигнал будет случайным со сплошным спектром. Огибающая спектра отраженного (доплеровского) сигнала определяется квадратом ДНА и диаграммой обратного рассеяния (ДОР) отражающий поверхности. Ширина доплеровского спектра
 ,
(2.20)
,
(2.20)
где Dg – выраженная в радианах ширина ДНА в плоскости угла g0.
Из выражения (2.20) можно получить (при Vв=0) полезную для оценки относительной ширины доплеровского спектра формулу DFд/Fд = Dgtgg. При типовых значениях g0 = 65...80° и Dg = 3...5° отнесенная к Fд ширина доплеровского спектра лежит в пределах 0,1... 0,5 (заметим, что в самолетных ДИС Fд < 15 кГц). Таким образом, выделенный в приемнике ДИС доплеровский сигнал представляет собой шумовое напряжение со сравнительно узким спектром, к-е можно рассматривать как квазигармонический сигнал со средней частотой Fд0, соответствующей g0.
25) Состав и назначение основных систем навигационных комплексов летательных аппаратов.
Комплексирование навигационных систем. Сущность комплексирования – использовать информацию об одних и тех же или функционально связанных параметрах, полученных от различных измерителей, для повышения точности и надежности определения навигационных параметров.
Потребность в одновременном измерении одних и тех же параметров обусловлена тем, что каждый измеритель в отдельности не удовлетворяет всем требованиям, которые предъявляются к измерению этих параметров. В частности, многие современные инерциальные навигационные системы не отвечают требованиям точности, радиосистемы ближней навигации – требованиям помехозащищенности, а доплеровские измерители скорости – требованию применимости в любых условиях полета и любых районах.
К настоящему времени степень интеграции устройств и систем такова, что комплексное использование информации наиболее широко применяется при ее вторичной обработке. В перспективных КНС предполагается комплексирование измерителей и при первичной обработке информации. Первичная обработка информации – это поиск, обнаружение, селекция, преобразование и усиление входных сигналов навигационных измерителей для определения навигационных параметров, например определение навигационных параметров, пропорциональных дальности до радиомаяка или азимуту объекта, в бортовом оборудовании радиосистем ближней навигации. Под вторичной обработкой информации понимают выполняемую в специализированных вычислителях или бортовых ЦВМ обработку выходных сигналов измерителей для определения навигационных элементов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.