Заметим, что этот же результат может быть получен и другим способом. Разностному уравнению (3) соответствует дисперсионное уравнение
![]() (4)
(4)
связывающее дисперсию
дискретного экспоненциально-коррелированного процесса ![]() с
дисперсией шума
с
дисперсией шума ![]() . В установившемся режиме (
. В установившемся режиме (![]() )
) ![]() , поэтому из (4) имеем:
, поэтому из (4) имеем: ![]() . Дисперсия непрерывного процесса
. Дисперсия непрерывного процесса ![]() в
установившемся режиме найдена:
в
установившемся режиме найдена: ![]() .
Естественно предположить, что дисперсии непрерывного процесса
.
Естественно предположить, что дисперсии непрерывного процесса ![]() и
дискретного процесса
и
дискретного процесса ![]() одинаковы.
Тогда
одинаковы.
Тогда 
Дискретной модели экспоненциально-коррелированного процесса соответствует схема, представленная на рис.1.
1.2. Описание метода моделирования
Моделирование экспоненциально-коррелированного процесса выполняется с помощью пакета «Simulink». Для начала работы следует включить пакет Matlab и нажать кнопку «Simulink». При этом на экране появится библиотека элементов «Simulink library browser».
При моделировании дискретных систем автоматического регулирования из раздела «Discrete» используются интеграторы и блоки задержки, из «Math Operations» - усилители и сумматоры, из «Sources» – датчики постоянных и случайных чисел, из «Sinks» - осциллографы и запись результата в файл.
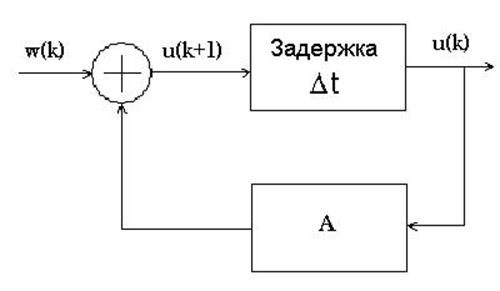
Рис.1
Моделирование в среде «Simulink» начинается с открытия
нового файла (раздел меню «File/New/Model»). При этом появляется чистый экран
без рисунков с надписью «Untitled» (рабочее поле моделирования). Построение схемы (см. рис.2),
соответствующей рис.1, выполняется с помощью выбора необходимых элементов в
библиотеке «Simulink library browser»
и переносе их (при нажатой левой кнопке мыши) на рабочее поле. При этом, задержке
![]() соответствует блок задержки «Unit Delay»
(раздел библиотеки «Discrete»), сумматору – блок суммирования «Sum»,
а элементу
соответствует блок задержки «Unit Delay»
(раздел библиотеки «Discrete»), сумматору – блок суммирования «Sum»,
а элементу ![]() – блок усиления «Gain» (раздел «Math Operations»), источником дискретного белого шума является датчик
случайных чисел «Random Number» (раздел «Sources»).
Результаты моделирования выводятся на осциллограф «Scope» и
записываются в файл expcor.mat с помощью элемента «To File» (раздел «Sinks»).
– блок усиления «Gain» (раздел «Math Operations»), источником дискретного белого шума является датчик
случайных чисел «Random Number» (раздел «Sources»).
Результаты моделирования выводятся на осциллограф «Scope» и
записываются в файл expcor.mat с помощью элемента «To File» (раздел «Sinks»).
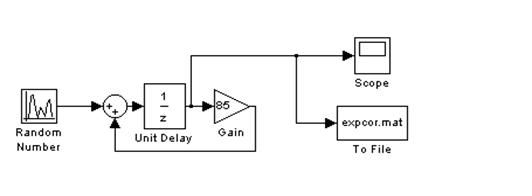
Рис.2
Соединения выходов и входов элементов выполняется при нажатой левой кнопке. Для выполнения дополнительного соединения (например, для элемента «To File») используется правая кнопка мыши.
Условия моделирования устанавливаются в разделе меню «Simulation/Configuration parameters». Для дискретных систем рекомендуется выбор режима моделирования с постоянным интервалом временной дискретизации: Type: «Fixed step», Solver: «discrete». На первом этапе время моделирования выбирается небольшим: параметр «Simulation time/Stop time» задается около 1000. Процесс моделирования начинается c выбора раздела меню «Simulation/Start».
Для того, чтобы посмотреть результат моделирования, выделяется (левой кнопкой мыши) элемент «Scope» и вызывается (правой кнопкой мыши) режим настройки параметров. При этом выбирается режим «Open block». Тот же результат получается при установке курсора на элемент «Scope» и двойном нажатии левой кнопки мыши. В меню открывшегося окна рекомендуется нажать кнопку автоматического масштабирования «Autoscale». Также следует убедиться в том, что объем данных индикатора не меньше объема экспериментальной выборки (раздел меню «Parameters»).
По умолчанию в датчике случайных чисел установлена дисперсия 1 и начальное значение генератора случайной последовательности 0. Если вызвать окно настройки элемента «Random Number/Parameters» (аналогично описанной ранее процедуре для элемента «Scope»), можно изменить параметры датчика. Среднее значение «Mean» обычно выбирается 0, дисперсия «Variance» устанавливается в соответствии с условиями задачи. Фаза псевдослучайной последовательности определяется числом «Initial seed». Можно изменить эту фазу, записывая любое целое число. Начальную установку фазы следует менять, если требуется получить различные случайные последовательности.
1.3. Задание по работе
1.Выбрать значение коэффициента усиления усилителя в соответствии с
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.