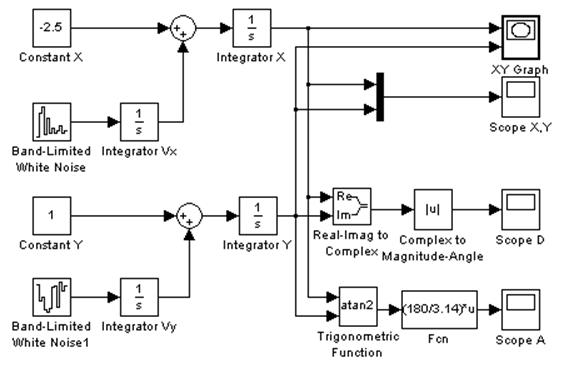
Рис.13
Схема моделирования в дискретном времени показана на
рис.14 (файл для моделирования: «Lab_5_Tr_Discr.mdl»). Уравнения модели и начальные условия
устанавливаются с помощью элемента «Discrete State-Space».
Шумы в каналах ![]() и
и ![]() формируются
элементами «Random Number X» и
«Random Number Y». Индикаторная
часть схемы осталась почти без изменений.
формируются
элементами «Random Number X» и
«Random Number Y». Индикаторная
часть схемы осталась почти без изменений.
7.2. Задание по работе
1. Выполнить моделирование горизонтальной траектории движения
объекта при нулевой мощности возмущающих шумов (варьируемые параметры: начальные условия и время моделирования; параметры элемента «XY Graph» установить так, чтобы была видна вся траектория движения объекта).
2. Исследовать влияние на траекторию объекта шума в
канале ![]() .
.
Выполнить моделирование для нескольких значений начальной фазы генератора шума (параметр «Seed» элемента «Band-LimitedWhiteNoise»).
3. Исследовать влияние шума в канале ![]() на траекторию объекта
на траекторию объекта
(также для нескольких значений начальной фазы генератора шума.
4. Выполнить моделирование наклонной прямолинейной траектории
объекта и исследовать влияние на нее обоих шумов.
5. Описать задачу моделирования траектории объекта в пространстве
состояний (в матричной форме). Выполнить переход от непрерывного к дискретному времени (для вычисления переходной матрицы использовать разложение матричной экспоненты в ряд).
6. Выполнить моделирование по п.4 в дискретном времени.
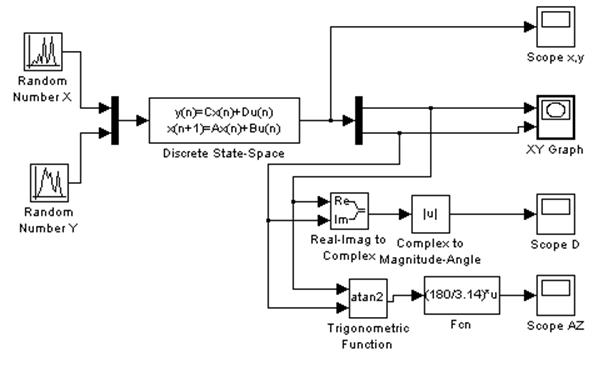
Рис.14
7.3.Содержание отчета
1. Схемы моделирования.
2. Описание формирующего фильтра в пространстве состояний для не-
прерывного и дискретного времени.
3. Осциллограммы типовых траекторий движения объекта (для
непрерывной и дискретной модели).
4. Формулировка задач проведенного исследования и выводы по полу-
ченным результатам.
7.4. Контрольные вопросы
1. Как изменяются характеристики шума после интегрирования?
2. Почему направление траектории иногда противоречит начальным
условиям![]() и
и ![]() ?
?
3. В чем заключается принципиальное отличие описания модели в
дискретном времени, используемого здесь, от других описаний (например, описания, получаемого с помощью билинейного преобразования)?
4. Какова размерность матрицы наблюдения?
5. Каким образом радиозвено контура управления влияет на выбор
прямоугольной или полярной системы координат, используемой при моделировании траектории объекта?
Список рекомендуемой литературы
1. Радиотехнические системы: Учеб. для вузов/Казаринов Ю.М., Коломенский Ю.М., Кутузов В.М. и др.; Под ред. Ю.М.Казаринова.-М.: Издательский центр «Академия», 2008.- 592с. (предыдущие изд.: 1990, 1968).
2. Соколов А.И., Юрченко Ю.С. Радиоавтоматика: учебник, - М.: Издательский центр «Академия», 2011. – 272с.
3. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. – Л.: Изд-во Ленингр.ун-та, 1985.- 160с.
Содержание
Введение…………………………..……………………………………………….3
Практическое занятие №1. Исследование экспоненциально-коррелирован-
ного процесса ……………………………………………………………......……3
Практическое занятие №2. Моделирование экспоненциально-коррелирован-
ного процесса с помощью дискретной следящей системы….. ………......…..10
Практическое занятие №3. Исследование цифрового дальномера с одним
интегратором …………………………………………………………….…….. 13
Практическое занятие №4. Оптимизация параметров цифрового следяще-
го измерителя с 2-мя интеграторами .……………………………………..….18
Практическое занятие №5. Исследование алгоритма комплексирования
датчиков высоты в схеме компенсации ……………………………………….22
Практическое занятие №6. Исследование алгоритма комплексирования
дальномера и датчика скорости по схеме следящего контура ……………….27
Практическое занятие №7. Моделирование движения объекта на плос-
кости ……………………………………………………………………………...32
Список рекомендуемой литературы …………………………………………...35
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.