|
|
|
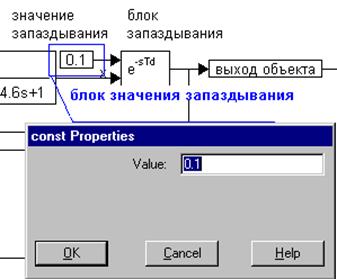
Рис. 19. Окно для задания запаздывания |
|
|
|
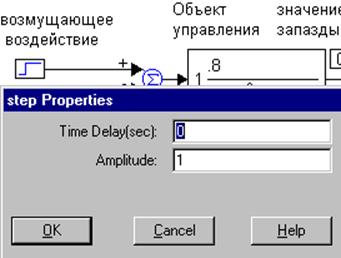
Рис. 20. Задание возмущающего воздействия |
Установите в окне необходимое значение. Нажмите ОК.
7. Подайте на вход системы единичное ступенчатое воздействие. Для этого нажмите правой кнопкой мыши на блок задания возмущающего воздействия. Появится окно, как показано на рис. 20. Установите в строке Amplitude значение 1, в строке TimeDelay оставьте 0. Нажмите ОК.
|
|
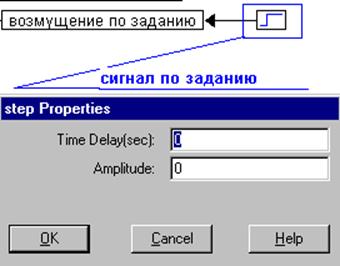
Рис.21. Создание возмущения по заданию |
8. Проверьте, чтобы сигнал по заданию был равен 0. Для этого нажмите правой кнопкой мыши на блок создания сигнала по заданию и установите в строке Amplitude 0, рис. 21.
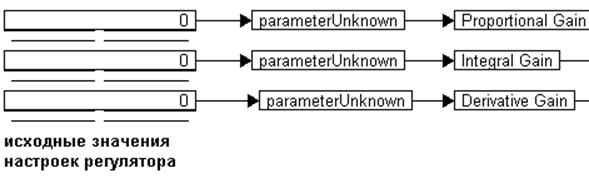
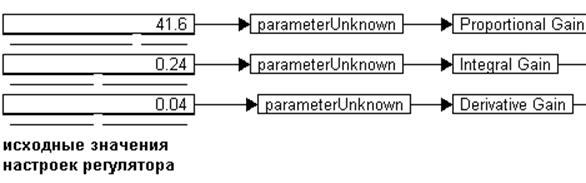
9. Установите рассчитанные значения настроек регулятора. Для этого используйте блоки задания значений, показанные на рис. 22.
|
|
|
Рис. 22. Блоки для задания исходных настроек ПИД-регулятора |
Нажмите правой кнопкой мыши на блок. Появится окно, показанное на рис. 23.
|
|
|
Рис. 23. Окно для задания входных значений |
Верхнее значение это Кр, среднее – Ти, нижнее – Тд. Используя любой способ, установите значения настроек ПИД-регулятора, как показано на рис. 24.
|
|
|
Рис. 24. Установленные начальные значения настроек |
10. Теперь необходимо установить время моделирования. Оно должно быть примерно равно времени регулирования, т.е. (3¸4)Тоб. В рассматриваемом случае время регулирования составляет около 15 сек. Для установления требуемого времени моделирования выберите из меню Simulateкоманду SimulationProperties. Появится диалоговое окно, как показано на рис. 3.
В строке Startоставьте 0, (моделирование начнется с нуля), в строке End установите необходимое время моделирования (в рассматриваемом примере 15), в строке StepSize установлен шаг моделирования, оставьте его равным 0.01. (Шаг моделирования не должен быть меньше времени запаздывания, т.е. если время запаздывания 0.001, шаг моделирования должен быть 0.0001.)
Нажмите ОК, диалоговое окно закроется.
11. Теперь необходимо провести моделирование (т.е. построить переходной процесс для данной передаточной функции, при установленных настройках регулятора). Для этого сначала нужно отключить оптимизацию. Выберите из меню Simulate команду OptimizationProperties. Появится диалоговое окно, как показано на рис. 25.
|
Рис. 25. Окно для установления свойств оптимизации |
В строке PerformOptimizationуберите флаг. Это значит, что Вы запретили оптимизацию. Нажмите ОК.
Выберите из меню SimulateкомандуGo
или нажмите F5, или пиктограмму
![]() .
.
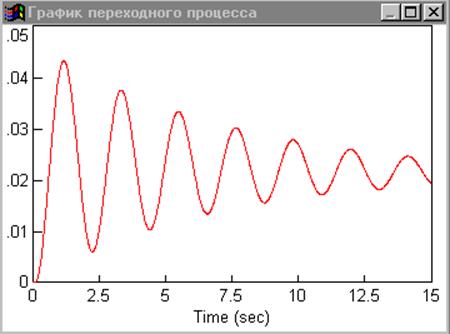
Будет построен переходной процесс, как показано на рис. 26.
|
|
|
Рис. 26. Переходной процесс с исходными настройками регулятора |
Данный переходной процесс имеет неудовлетворительные характеристики, поэтому проведем оптимизацию настроек регулятора и добьемся приемлемого качества регулирования.
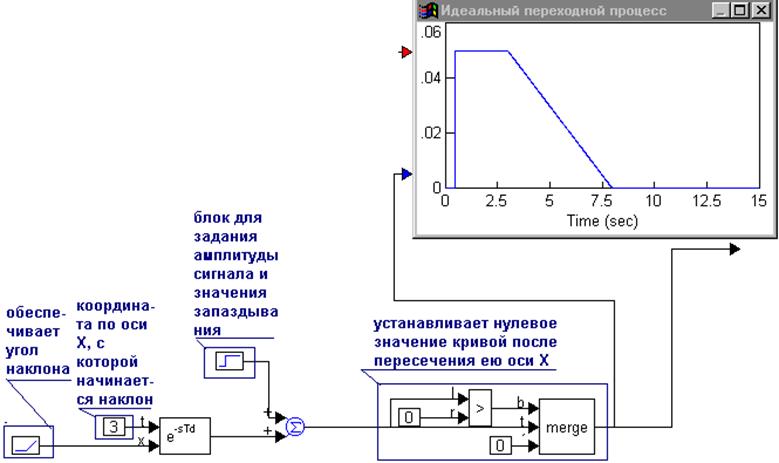
12. Прежде чем начать оптимизацию, необходимо определить, какой идеальный переходной процесс Вы хотите получить, и построить его в блоке «Идеальныйапериодическийпроцесс».
Для этого необходимо войти в блок «Идеальныйапериодическийпроцесс» нажатием правой кнопки мыши на блоке. Перед Вами появится нижний уровень диаграммы, как показано на рис. 27.
|
|
|
Рис. 27. Уровень диаграммы для создания идеального переходного процесса |
Нажмите правой кнопкой мыши на блок задания амплитуды сигнала и значения запаздывания, появится диалоговое окно (рис. 28).
|
|
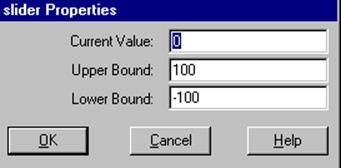
Рис. 28. Диалоговое окно step Properties |
Установите значение запаздывания в строке TimeDelay, равное значению запаздывания передаточной функции. В строке Amplitude установите желаемое динамическое отклонение (значение должно быть несколько меньше амплитуды переходного процесса на графике, показанном на рис. 26).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.