Закладка Integration Method окна Simulation Properties позволяет выбрать один из семи методов интегрирования: Euler, trapezoidal, Runge Kutta 2-ого порядка, Runge Kutta 4-ого порядка, адаптивный Runge Kutta 5-ого порядка, адаптивный Bulirsh-Stoer, и обратный Euler.
Закладка Preferencesproperty окна SimulationProperties содержит опции для проверки несвязанных блоков, выбранных точек моделирования, выбора единиц частоты (рад. или Гц), и др. На листе Defaults устанавливаются значения по умолчанию.
Запуск диаграмм
VisSim позволяет моделировать линейные, нелинейные, непрерывные, и дискретные системы. VisSim может также моделировать систему, содержащую и непрерывные и дискретные передаточные функции. Так же возможно моделирование систем, содержащих многочастотное квантование для дискретных передаточных функций.
В VisSim существуют два способа задания передаточной функции. Самый обычный способ – через блок transferFunction. Передаточная функция задается в виде коэффициентов полиномов числителя и знаменателя.
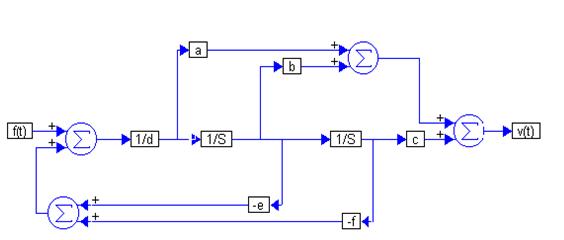
Другой способ осуществляется с помощью блоков Variable и Integrator (рис. 4).
У передаточной функции самая высокая степень знаменателя полинома m должна быть больше или равна степени числителя n.
|
|
|
Рис. 4. Диаграмма передаточной функции второго порядка |
Более удобным является способ с помощью блока transferFunction.
Дискретные системы моделируют, используя блоки unitDelay, transferFunction и StateSpase.Шаг квантования устанавливается в строке параметра DT в диалоговом окне Properties этих блоков.
Дискретные системы в VisSim могут быть заданы как многочастотными, т.е. они могут содержать блоки с различными периодами квантования.
Дифференциальные уравнения для дискретных систем подобны обычным дифференциальным уравнениям, но вместо непрерывных функций, используются функции в разностных уравнениях.
В VisSim в модели одновременно могут использоваться дискретные и непрерывные блоки. Такие системы называются гибридными системами. В гибридных системах выходы дискретных блоков обновляются во время, которое соответствует указанному дискретному типовому времени. Выходы непрерывных блоков обновляются при каждом шаге. Точно так же входы к дискретным блокам обновляются во время, которое соответствует дискретному интервалу времени, в то время как входы к непрерывным блокам обновляются при каждом шаге.
Гибридные системы могут также быть многочастотными. Для моделирования гибридной системы, шаг времени моделирования должен быть равным (или меньше), чем самая маленькая величина всех времен, используемых в дискретных блоках.
Выполнение оптимизации
Оптимизация подразумевает под собой автоматическое регулирование параметров системы для достижения максимального или минимального значения, при удовлетворении того или иного глобального ограничения.
В течение оптимизации, VisSim изменяет значение параметра так, что функция стоимости уменьшается до тех пор, пока не находит своего минимального значения. Окончательная величина параметра будет оптимальной величиной, т.к. минимизировано значение функции стоимости.
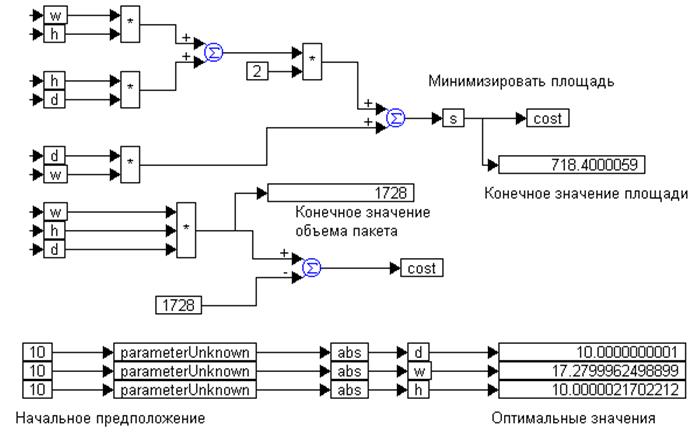
Рассмотрим задачу по нахождению оптимального размера пакета.
Чтобы минимизировать стоимость материала, необходимо определить оптимальные размеры пакета, чтобы минимизировать количество бумаги. При этом необходимо обеспечить объем пакета (v=whd) не менее 1728 кубических дюймов. Стоимостная функция представлена в следующем виде:
|
|
(1) |
где s – это площадь пакета; w – ширина; h – высота; d – глубина.
Стоимостная функция подчиняется следующему ограничению по объему:
|
|
(2) |
На рис. 5 представлена диаграмма VisSim для решения этой задачи.
|
|
|
Рис. 5 Диаграмма для решения задачи по оптимизации размеров пакета |
Три блока const используются для задания начального предположения. Их выходы связаны с тремя блоками parameterUnknown. Т.к. физические параметры пакета должны быть величины положительные, выходы блоков parameterUnknown соединяются с тремя входами блоков abs. Выходы блоков abs связаны с тремя блоками variable, названными d, w и h. Их выходы связаны с блоками display, для показа изменений и заключительных значений параметров.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.