Этот участок не оказывает влияния на качество процесса регулирования. Участок проводится параллельно ЛАЧХ некорректированного звена сразу после выхода ее из участка средних частот ограниченного запасом устойчивости.
Желаемая ЛАЧХ приведена на рисунке 7.
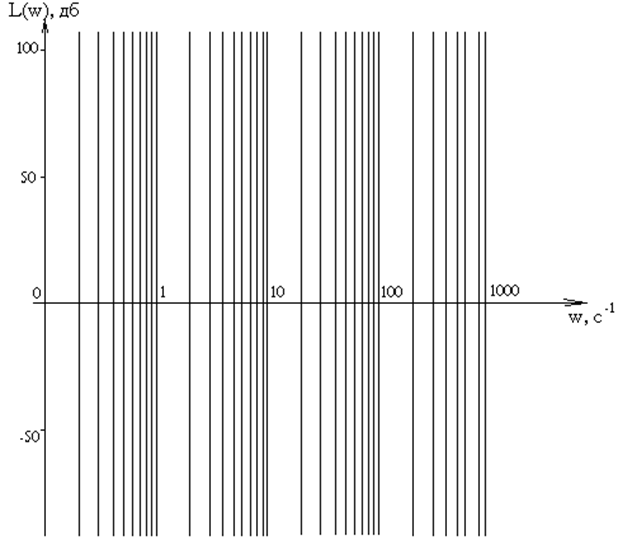
Рисунок 7 Желаемая ЛАЧХ
5.3 Построение ЛАЧХ корректирующего устройства
Выбираем последовательное включение корректирующего устройства в общую схему включения из-за простоты расчета и включения, т.к. требования к точности АСР не накладывается. ЛАЧХ звена коррекции определяем графически путем вычитания некорректируемой ЛАЧХ из желаемой ЛАЧХ: Lзк(w)=Lж(w)- Lнк(w). ЛАЧХ приведена на рисунке 8.
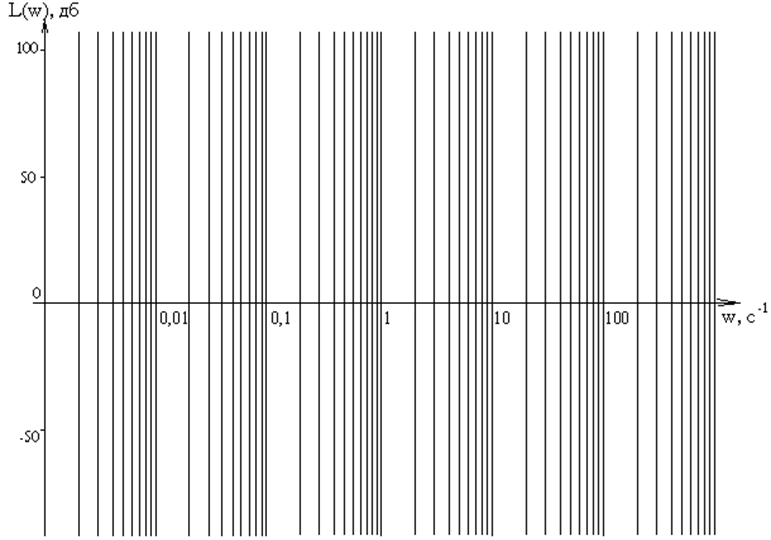
Рисунок 8 ЛАЧХ корректирующего устройства
По полученной ЛАЧХ выбираем по справочнику [1] корректирующую цепочку, состоящую из трех последовательно соединенных звеньев.
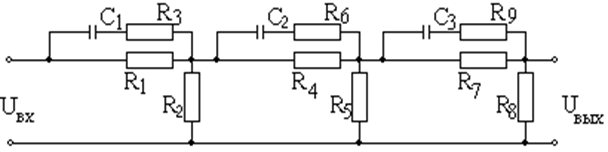
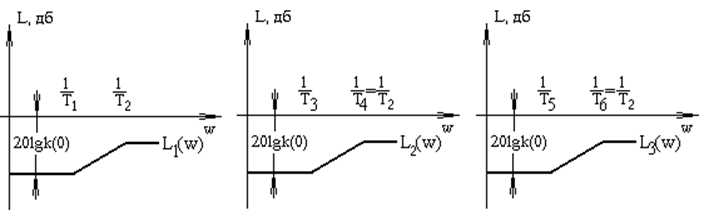
Рисунок 9 Корректирующая цепочка, состоящая из трех последовательно соединенных звеньев и ЛАЧХ этих трех звеньев
Для первой цепочки справедливы следующие соотношения:

Для второй цепочки справедливы следующие соотношения:

Для третьей цепочки справедливы следующие соотношения:

Учитывая соотношения для цепочек, найдем цифровые значения элементов корректирующего устройства.
1) Предположим, что С1=500 мкФ и R3=100 Ом, значит исходя из соотношений имеем:
Подставив численные значения, получаем:
Составим соотношения:

Исходя из этих соотношений, получаем:
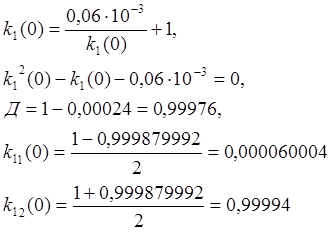
Для дальнейших расчетов выбираем k1(0)=0,00006 и находим:
 Ом
(1 МОм).
Ом
(1 МОм).
 Ом.
Ом.
Подставляем полученные данные в передаточную функцию цепочки и получаем:

2) Предположим, что С2=50 мкФ и R6=100 Ом, значит исходя из соотношений имеем:
Подставив численные значения, получаем:
Составим соотношения:

Исходя из этих соотношений, получаем:
Для полученного k2(0)=0,005809 находим:
 Ом
(0,2 МОм).
Ом
(0,2 МОм).
 Ом.
Ом.
Подставляем полученные данные в передаточную функцию цепочки и получаем:

3) Предположим, что С3=500 мкФ и R9=100 Ом, значит исходя из соотношений имеем:
Подставив численные значения, получаем:
Составим соотношения:

Исходя из этих соотношений, получаем:
Для дальнейших расчетов выбираем k3(0)=0,6 и находим:
 Ом.
Ом.
 Ом.
Ом.
Подставляем полученные данные в передаточную функцию цепочки и получаем:

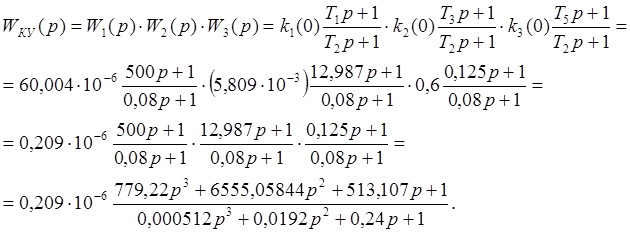
Суммарная передаточная функция корректирующего устройства будет иметь вид:
Структурная схема после включения корректирующего устройства представлена на рисунке 10.

Рисунок 10 Структурная схема системы с корректирующим устройством
Передаточная функция разомкнутой системы после подключения корректирующего устройства будет иметь вид:

Передаточная функция замкнутой системы после подключения корректирующего устройства будет иметь вид:

5.4 Построение переходной характеристики системы с корректирующим устройством
Построение переходного процесса производим при помощи программы «Mathcad7 Standard»:
Из рисунка 13 видно, что время регулирования составляет 3,5 с, а устойчивое значение регулируемой величины равно 1.
Вывод: В процессе выполнения данной курсовой работы, я рассчитал каждый из элементов данной АСР, проверил ее на устойчивость и нашел переходную характеристику. Затем рассчитал корректирующую цепочку, и построив переходную характеристику системы с включенным корректирующим устройством, определил изменение времени регулирования.
При расчетах оказалось, что регулируемый параметр системы без корректирующего устройства приходит к устойчивому положению при времени регулирования равным 5,2 с, а у системы с корректирующим устройством регулируемый параметр приходит к устойчивому положению при времени регулирования равным 3,5 с.
Это говорит о том, что корректирующее устройство в данную систему вводить нужно для уменьшения времени регулирования регулируемого параметра.
1. Фатеев А.В., Вавилов А.А., Смольников Л.П. и др. Расчет автоматических систем / Под ред. А.В. Фатеева. М.:Высш.шк., 1973, 336 с.
2. Хлыпало Е.И. Нелинейные системы автоматического регулирования: Расчет и проектирование / Под ред. Е.П.Попова. Л.: Энергия, 1967, 452 с.
3. Теория автоматического управления: В 2 ч./ Под ред. А.В.Нетушила. М.:Высш шк., 1968. Ч.1, 424 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.