Для этого выберем последовательно пункты меню “Оптимизация параметров регулятора методом поиска”, “Выбрать критерий оптимальности”, “Критерий ITAE“, “Выбор варьируемых параметров”, “Коэффициент регулятора Кр”, “Время изодрома Ти” (рисунок 32).
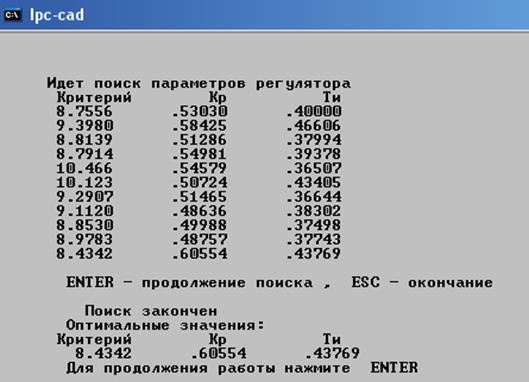
Рисунок 32 – Оптимизация параметров регулятора
12. Выберем пункт меню “Моделирование переходного процесса в САР”. Ознакомимся с графиком и показателями переходного процесса на выходе САР (рисунок 33, 34).
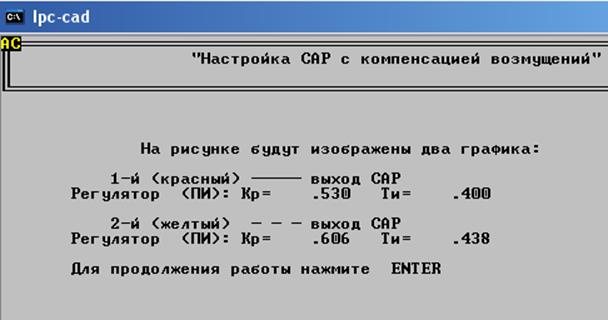
Рисунок 33 – Моделирование переходного процесса в САР
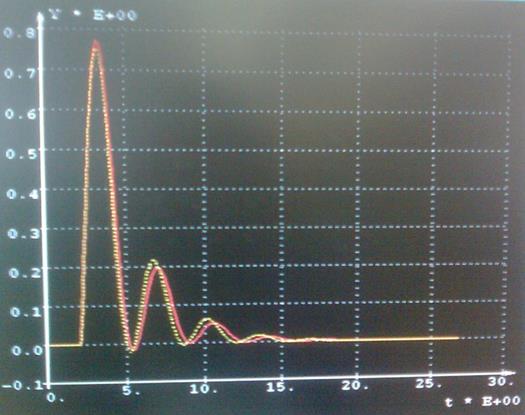
Рисунок 34 – График переходных процессов в САР: с оптимальными параметрами (жёлтый); с прежними параметрами (красный)
Переходной процесс в САР с оптимизированными параметрами, показанный на рисунке 34 имеет следующие показатели качества:
максимальная динамическая ошибка = 0.756649;
степень затухания = 0.712408;
время регулирования = 10.6167;
перерегулирование
𝜎% = ![]()
По графику, изображенному на рисунку 34 можно сделать вывод, что процесс колебательный, по сравнению с процессом на рисунке 31 динамическое отклонение уменьшилось, время регулирования уменьшилось, перерегулирование значительно уменьшилось.
13. Проведем настройку параметров компенсатора. Тип компенсатора – интегро-дифференцирующее звено. Возмущение – импульс длительностью 0,56 с. Для этого выйдем в основной режим и выберем последовательно пункты меню “Настройка компенсатора”, “Расчет параметров компенсатора”, “Интегро-дифференцирующее звено ” (рисунок 35)
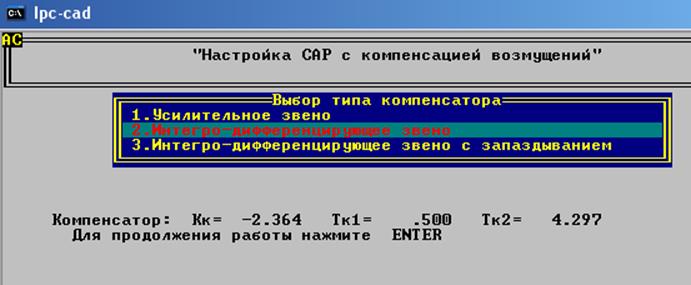
Рисунок 35 – Расчёт параметров компенсатора
14. Выйдем в режим “Настройка компенсатора” и выберем пункты меню “Выбор возмущения”, “Импульс”. Длительность импульса возьмем 0,2 τв .
0,2 τв=0,2*2,8=0,56
15. Перейдём к пункту “ Моделирование переходного процесса в САР” и получим график переходного процесса на выходе САР (рисунок 36, 37).
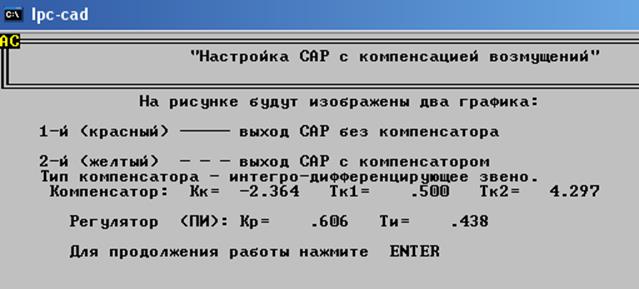
Рисунок 36 – моделирование переходного процесса в САР

Рисунок 37 – График переходных процессов: САР без компенсатора (красный); САР с компенсатором (жёлтый)(Импульс 0,2τоб=0,68)
По графикам на рисунке 37 видно, что САР с компенсатором хуже справляется с импульсным воздействием в отличие от САР без него. На графике видно, что увеличилась колебательность и время регулирования, но уменьшилось динамическое отклонение.
16. Оптимизируем параметры компенсатора методом поиска. Критерий оптимальности ITAE. Для этого выберем последовательно пункты меню “Оптимизация параметров компенсатора методом поиска”, “Выбрать критерий оптимальности”, “Критерий ITAE“ (рисунок 38).
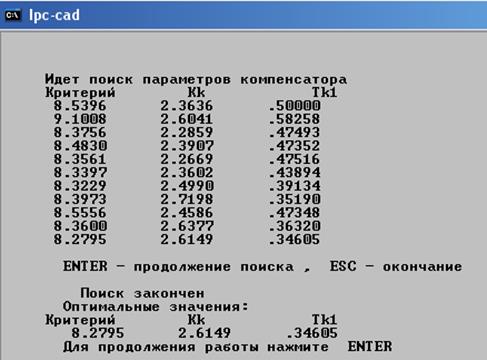
Рисунок 38 – Оптимизация параметров компенсатора
17. Перейдём к пункту “ Моделирование переходного процесса в САР” и получим график переходного процесса на выходе САР (рисунок 39, 40).
Рисунок 39 – Моделирование переходного процесса в САР
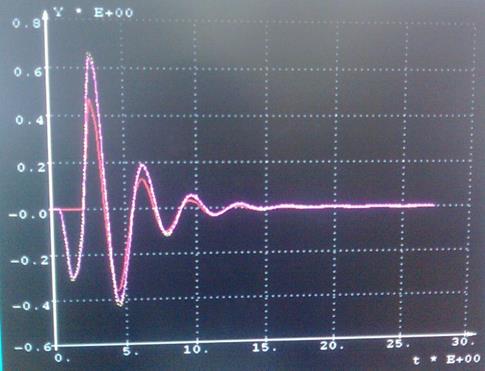
Рисунок 40 –Графики переходных процессов: САР с компенсатором с оптимальными параметрами компенсатора (жёлтый); САР без компенсатора (красный)
Переходной процесс в САР с оптимизированными параметрами, показанный на рисунке 16 имеет следующие показатели качества:
максимальная динамическая ошибка = 0,296286;
время регулирования = 9,91667;
По графикам на рисунке 40 можно сделать вывод о том, что переходной процесс в САР с оптимальными параметрами имеет более качественные показатели чем в САР с исходными параметрами, в частности меньше время регулирования.
Выберем пункт меню “Вывод протокола на экран” и просмотрим содержимое протокола (рисунок 41).


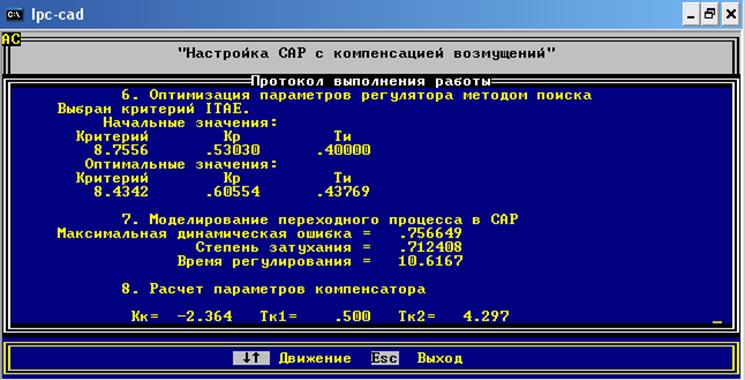

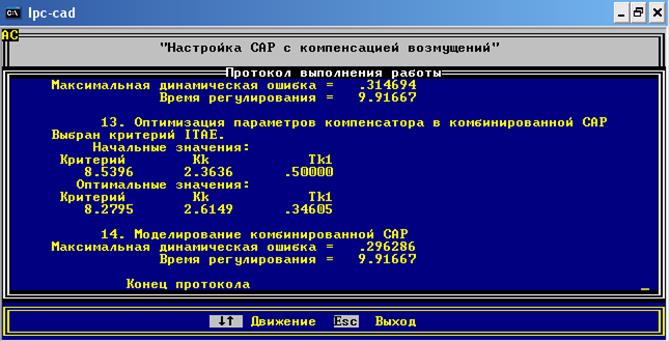
Рисунок 41 — Содержимое протокола
Проведём моделирование переходного процесса в пакете VisSim.
Проверим результаты расчета САР с программе VisSim. Введем параметры своей модели в блок «объект» и проведем моделирование переходного процесса в САР по возмущении по нагрузке (рисунок 42).
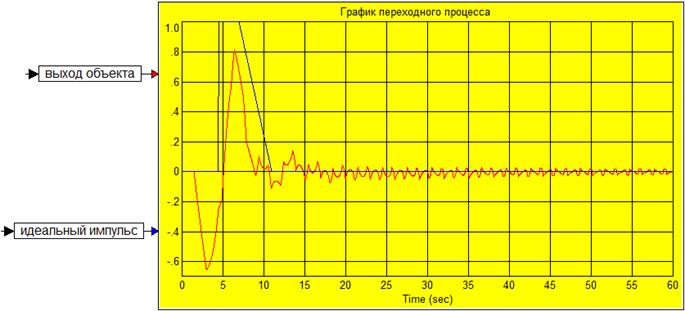
Рисунок 42 –График переходного процесса комбинированной САР в VisSim
Вывод:
Освоили настройку и анализ САР с предиктором Смита с помощью программы IPC-CAD и VisSim 3.0. Освоили настройку и анализ комбинированной САР с помощью программы IPC-CAD и VisSim 3.0.
САР с предиктором Смита даёт лучшие показатели регулирования, в отличие от САР без него. Вид переходного процесса меняется с колебательного на апериодический, уменьшается динамическое отклонение, компенсируется запаздывание объекта. Комбинированная САР компенсирует возмущения на входе системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.