Выбор типа регулятора производится с учетом характеристик объекта и требуемого качества регулирования. В частности, пропорциональный или П-регулятор можно применять при работе как на устойчивых (статических), так и на нейтральных объектах, если допустима статическая ошибка регулирования. При работе с объектами первого порядка П-регулятор формирует апериодический переходной процесс, а с объектами второго порядка - либо апериодический, либо колебательный.
Введение интегральной или И-составляющей в закон регулирования усложняет динамику переходных процессов, повышая порядок дифференциального уравнения системы. При этом возможно появление апериодических и колебательных процессов. Наличие И-составляющей гарантирует отсутствие статической ошибки. И-регуляторы применяют для работы только на статических объектах и когда допустимы большие значения динамической ошибки и времени регулирования tр.
Пропорционально-интегральные или ПИ-регуляторы широко используют для работы на статических и астатических (нейтральных) объектах, когда статическая ошибка должна быть равной нулю. Показатели качества регулирования улучшают, увеличивая коэффициент усиления пропорциональной части регулятора kр.
Введение дифференциальной или Д-составляющей значительно уменьшает скорость отклонения регулируемой величины от заданного значения.
Проверка САР на грубость или робастность
Зачастую параметры ОР определены с ошибкой или изменяются во времени. В этих условиях необходимо проверить рассчитанную САР на нечувствительность (грубость, робастность [от англ. – robustness]) к возможным вариациям параметров системы для наихудших условий – увеличению коэффициента передачи Коб и запаздывания τоб объекта регулирования. Для этого оценивают возможные отклонения параметров объекта регулирования и проверяют САР с новыми параметрами на устойчивость построением переходного процесса.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Работа с программой IPC-CAD для расчета САР
Общие сведения
Для расчета и моделирования одноконтурных САР используется программа IPC-CADс исполняемым файлом START.BAT. В программе используется драйвер русификации клавиатуры rkega.com, в котором для переключения клавиатуры с русского языка на латиницу (RUS/LAT) используется сочетание клавиш LeftShift + RightShift (одновременное нажатие обоих клавиш Shift клавиатуры). Программа чувствительна к регистру клавиатуры, поэтому необходимо при вводе команд yes – y или no – nследить, чтобы не была нажата клавиша CapsLock. Программа IPC-CADснабжена контестно-зависимой справкой, которая вызывается нажатием клавиши F1.
Для выхода из программы, ее отдельных пунктов следует нажать клавишу Esc.
В программе расчета одноконтурных САР в качестве типовых переходных процессов (рис. 15) используются:
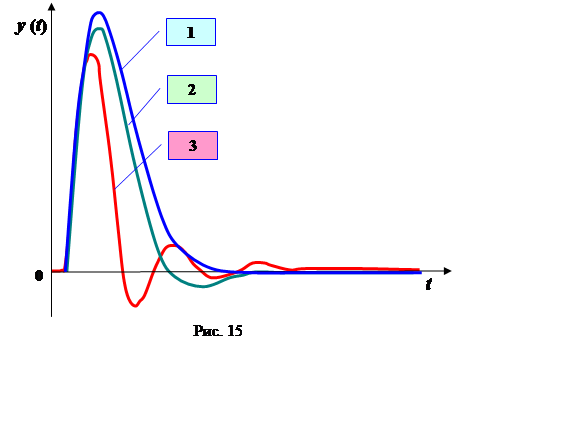 - апериодический (кривая 1);
- апериодический (кривая 1);
- с умеренным затуханием (кривая 2);
- колебательный (кривая 3).
Апериодический переходной процесс в САР обеспечивает наименьшее время регулирования tр, но при этом наблюдается наибольшее динамическое отклонение y1. При колебательном процессе, наоборот, динамическое отклонение y1 минимально, но время регулирования tр самое большое.
Критерии оптимальности работы САР
Критериями оптимальности работы САР могут служить различные показатели качества регулирования, например, динамическое отклонение y1, время регулирования tр, статическая ошибка yст , перерегулирование h и др. Однако каждый из этих показателей оценивает лишь одно определенное свойство САР, а некоторые из них противоречат друг другу. Так, при уменьшении времени регулирования tр возрастают динамическое отклонение y1 и перерегулирование h. Поэтому в качества критерия оптимальности часто используют интегральные критерии качества.
В программе IPC-CADиспользуются три критерия оптимальности функционирования САР, а именно: квадратичный критерий ISE, модульный IAE и критерий ITAE, который условно можно назвать время-модульным.
Сокращенные обозначения критериев расшифровываются следующим образом:
ISE: I – integral, интеграл; S – square, квадрат; E – error, ошибка;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.